MONOist >
組み込み開発フォーラム
組み込みソフトウェア/ハードウェア開発における技術力の向上、改善・最適化などを幅広く支援する“組み込み開発エキスパート”のための情報フォーラム
Top Stories

山浦恒央の“くみこみ”な話(176):
ECサイトを題材にソフトウェア開発の全工程を学ぶ新シリーズ「イチから全部作ってみよう」がスタート。シリーズ第7回は、要求仕様フェーズで作り上げる正しい要求仕様書に向けた第一歩となる「ヒアリング」について解説します。
(2024年04月18日)


FEATURES

製造メディア総力特集:
現場でデータ処理を行う「エッジコンピューティング」が盛り上がりを見せている。なぜクラウドだけではだめなのか。その最新の技術動向と、活用事例を紹介する。
- 製造業のためのアジャイル開発入門
- これだけは知っておきたい機能安全
- PoCの壁を超えろ!新時代のIoT活用戦略
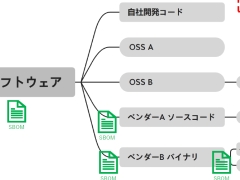
- ソフトウェアサプライチェーンの守り方
- 徹底解説!IoTビジネスを進化させるマルチキャリアSIM
- Windows 11時代に突入するIoT機器向けWindows
- Arm最新動向報告/
- 仮想環境を使ったクラウド時代の組み込み開発のススメ
- ROSを使ってロスなくロボット開発
- もう失敗しない!製造業向け機械学習Tips
- 経験ゼロから始めるIoTデバイス入門
- ラズパイのセキュリテイ対策
- いまさら聞けないCIP入門
- Jetson Nanoで組み込みAIを試す
- 組み込み技術者向けTLS1.3基礎解説
- 待ったなし!組み込み機器のWindows 10 IoT移行
- 新・いまさら聞けないFPGA入門
- IoT観測所
- いまさら聞けない機械学習入門
- 基礎から学ぶSTAMP/STPA
- いまさら聞けないHILS入門
- セキュリティを意識したIoTデバイス設計の勘所
- 車載ネットワーク“CANの仕組み”教えます
- プロジェクトを成功させるモデリングの極意
- 「ESP8266」で始めるIoT DIY
- 「mbed」で始めるARMマイコン開発入門
- 組み込み機器開発入門
- mruby概論
- 電子工作“超”入門
- 完全マスター! 組み込みC言語プログラミング
- アイデア・ハック!! TWE-Liteで家庭内M2M計画
- Scratch 2.0で体験! お手軽フィジカルコンピューティング
- アイデア・ハック!! Arduinoで遊ぼう
- H8で学ぶマイコン開発入門
- Arduinoで学ぶ基礎からのモーター制御
新着記事一覧















» ページトップへ
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
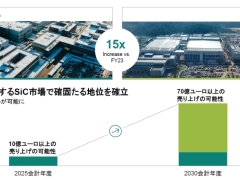
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CAN通信におけるデータ送信の仕組みとは?
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CANプロトコルを理解するための基礎知識
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。