10周年記念大会となるETロボコン2011の概要が明らかに!!:競技内容と走行体&開発環境にも変化が
10周年記念大会となる「ETロボコン2011」のマスコミ向け説明会が開催された。説明会ではその全体像と競技内容、走行体&開発環境の新仕様について披露された
シーソー、階段、ミステリーサークルと史上最高の難所が登場し、熱戦が繰り広げられた「ETソフトウェアデザインロボットコンテスト(以下、ETロボコン)2010」(主催:社団法人 組込みシステム技術協会)のチャンピオンシップ大会から約2カ月半が経過した2011年2月14日。記念すべき10周年に当たる次回「ETロボコン2011」のマスコミ向け説明会が実施され、大会概要が披露された。
ETロボコンとは、指定されたロボット(走行体:LEGO Mindstorms NXT)を用い、ソフトウェアの設計を競うコンテストで、設計モデルの審査と走行競技の結果の双方で評価される。その主たる目的は、組み込みシステム開発における分析・設計モデリングと、モノづくりの楽しさを経験する“教育機会の提供”にある。
説明会の冒頭に登壇したETロボコン実行委員会 運営委員長の小林 靖英氏は「ソフトウェアを重視した世界的にもユニークな教育ロボコンだ」とETロボコンについて紹介し、ETロボコン2011の全体像について説明を行った。
| 関連リンク: | |
|---|---|
| ⇒ | 熱き戦いが繰り広げられたETロボコン2010 |
| ⇒ | ETロボコン2011公式サイト |
ETロボコン2011の全体像
ETロボコン2011の地区大会は、昨年の10地区(北海道、東北、北関東、東京、南関東、東海、北陸、関西、九州、沖縄)に、「中四国」地区を新たに加え、全11地区で開催される(補足)。また、10周年の記念大会ということでチャンピオンシップ大会出場枠(例年40チーム)を拡張し、“52チーム”で行われる予定。「産学官連携による地域人材育成の観点から誰もが参加しやすいように地域を拡大し、かつ各地区大会の開催地も持ち回りで展開していく方針だ」(小林氏)という。
 図1 全国11地区にて地区大会開催
図1 全国11地区にて地区大会開催 画像1 ETロボコン実行委員会 運営委員長 小林 靖英氏
画像1 ETロボコン実行委員会 運営委員長 小林 靖英氏2月からの実施説明会(2〜3月)、技術教育(5〜6月)、試走会(7〜8月)、モデル審査(8〜9月)を経て、9〜10月にかけて全国11地区で開催される地区大会でチャンピオンシップ大会(11月16、17日:パシフィコ横浜)出場チームが選抜される。
ETロボコンは、主に各地区における産学官の関係者によるボランティアで運営されており、各地区ごとに勉強会や試走会、評価会などの独自企画の実施やフォロー体制もある。単なる教育機会の提供の場としてだけでなく、“技術者同士の交流の場”という点もETロボコンの大きな魅力といえる。
 図2 チャンピオンシップへの選出
図2 チャンピオンシップへの選出競技内容と走行体&開発環境にも変化が
昨年を例に挙げると、シーソー、階段、ミステリーサークルなど、コース途中に配置されている難所攻略が競技部門での勝敗を大きく左右する。チャレンジし、成功すれば大幅なタイム短縮が狙えるが、当然、失敗(リタイヤ)のリスクもある。
ETロボコン実行員会 技術委員/性能審査団 近政 隆氏は「難所チャレンジで失敗するとほとんどポイントなしになるため、安全側、つまり難所チャレンジをしないチームもあった(難所チャレンジ率の低下)。また、従来のコース構成では、正確にチームの実力を評価できないという懸念があった」と昨年大会の反省点を述べ、「コースをタイムアタックエリアと難所チャレンジエリアの2ステージに分離する方向で検討している」とETロボコン2011大会の競技内容の方針を明らかにした。
 図3 ETロボコン2011 コースの2ステージ構成
図3 ETロボコン2011 コースの2ステージ構成そのほかの競技内容のポイントについては、以下の図4を参照のこと。
 図4 ETロボコン2011 競技内容
図4 ETロボコン2011 競技内容走行体については、「転倒時の走行体保護」「部品取り付け部の強化」「見た目/使い勝手の改善」など、昨年大会参加者アンケートの内容をフィードバックする形で改善されるほか、競技とモデルをより進化(深化)させるための仕組みとして、モーターを1つ追加し、「走行体自身による完全自立停止⇔バランス走行切り替え」を、さらには参加者が用意した任意の機器(PCやスマートフォンなど)との「競技中のBluetooth通信」を許可する方針だという。
 図5 ETロボコン2011 走行体(仮)。センサ一体型頭部、本体保護バンパーなど走行体保護を目的とした改善が見られる。「従来のETロボコンキット『NXT-A』で組み立て可能な仕様になっているため追加投資が不要」(近政氏)だという
図5 ETロボコン2011 走行体(仮)。センサ一体型頭部、本体保護バンパーなど走行体保護を目的とした改善が見られる。「従来のETロボコンキット『NXT-A』で組み立て可能な仕様になっているため追加投資が不要」(近政氏)だという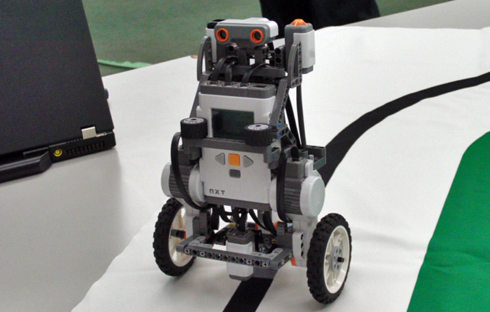 画像2 説明会で披露されたETロボコン2011仕様の走行体(仮) その1
画像2 説明会で披露されたETロボコン2011仕様の走行体(仮) その1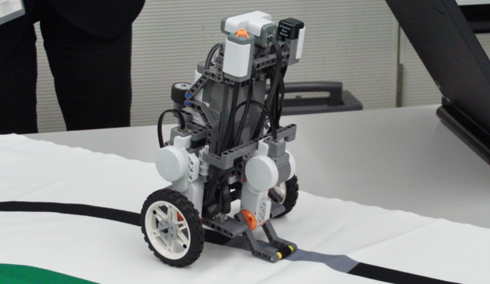 画像3 説明会で披露されたETロボコン2011仕様の走行体(仮) その2
画像3 説明会で披露されたETロボコン2011仕様の走行体(仮) その2 図6 Bluetooth通信機器と走行体。バランス走行状態での機器操作はNG(通信自体はOK)だが、完全自立停止状態であればリモートスタートなどの操作は許される
図6 Bluetooth通信機器と走行体。バランス走行状態での機器操作はNG(通信自体はOK)だが、完全自立停止状態であればリモートスタートなどの操作は許される走行体向けの開発環境は昨年と同様で、今回加わるBluetooth通信機器向けの開発環境については「PC向け簡易サンプルプログラムを提供予定」だという。なお、本稿で紹介した内容は一部検討段階のものも含まれる。最終的な競技規定などは、2011年4月上旬に事務局より公開される予定だ。
ETロボコン2011の参加申し込みの受け付けは、2011年3月7日から4月6日の17:00まで。高校生以上が対象で、教育機関(高校、高専、専門、短大、大学)や企業での参加のほか、個人での参加も可能だ。詳細はETロボコン公式サイトをご覧いただきたい。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 景気減速でソフト開発の脆弱性対応が後手に? SBOM整備の取り組みも足踏みか
- CANプロトコルを理解するための基礎知識
- 低価格FPGAでも文字認識AIの学習は可能なのか
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- 【問題7】10進数を2進数に変換するプログラム
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。