自由度と、リンク機構の基本のいろいろ:メカメカリンクで設計しよう(1)(3/3 ページ)
» 2011年04月15日 11時35分 公開
[山田学 ラブノーツ/六自由度技術士事務所,MONOist]
「対偶」って、何だろう?
対偶とは、構成するリンク機構のうち、対となる2つのリンクが相対的な運動の自由度を残して結合したものをいいます。リンク機構を構成する上で、基本となる対偶の種類は次の6つです。
- 回転対偶(自由度=1) 例:チョウバン、転がり軸受けなど
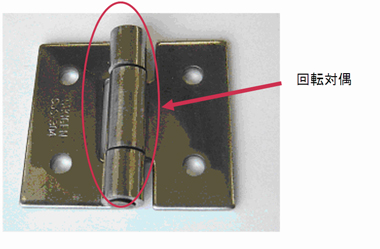 図7 回転対偶
図7 回転対偶- すべり対偶(自由度=1) 例:ガイド溝、リニアガイドなど
 図8 すべり対偶
図8 すべり対偶- 回転+すべり対偶(自由度=2) 例:ボールブッシュなど
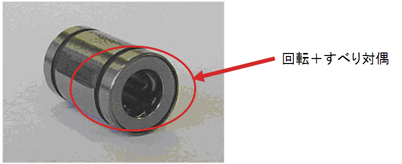 図9 回転+すべり対偶
図9 回転+すべり対偶- ねじ対偶(自由度=1) 例:ねじ機構、ボールねじなど
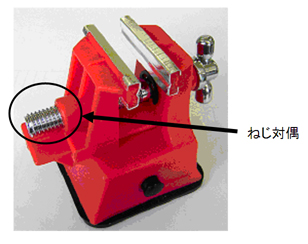 図10 ねじ対偶
図10 ねじ対偶- 球対偶(自由度=2 or 3) 例:ボールジョイントなど(ジョイント部でねじり回転できる場合は自由度3)
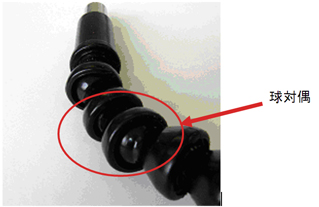 図11 球対偶
図11 球対偶- 移動対偶(自由度=2 or 3) 例:ドラフター、広域ワイパー機構など(平面上で回転できる場合は自由度3)
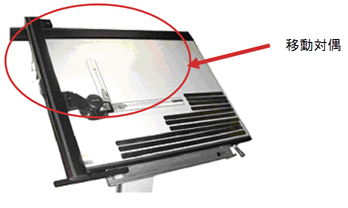 図12 移動対偶
図12 移動対偶上記6種類の対偶を組み合わせてリンク機構の構成を考えて組み合わせることで、オリジナルのリンク機構を創造することができるのです。
次回は、基本的なリンク機構の種類を理解し、リンクの長さを変えるだけで違った動作ができるという四節リンク機構の特徴を知りましょう。(次回に続く)

関連記事
 羽を回転させる力を首振りに変換する扇風機の「リンク機構」
羽を回転させる力を首振りに変換する扇風機の「リンク機構」
身近にあるモノを題材に、それがどんな仕組みで動いていて、どんな機構が使われているのかを分かりやすく解説する連載。今回はつまみの付いた昔ながらの扇風機をテーマに、首振り機構の仕組みを理解する。 クローズドループ構造のいろいろ
クローズドループ構造のいろいろ
第1回で登場した回転対偶やすべり対偶を組み合わせて、1自由度を持つ平面リンクに絞って詳しく解説する。 航空機の車輪格納に使われるリンク機構
航空機の車輪格納に使われるリンク機構
動作が終わったとき、コンパクトに格納したい! そんな機構を作るときのよいお手本が、航空機の車輪格納機構だ。 自動車のワイパーを上手に動かすリンク機構
自動車のワイパーを上手に動かすリンク機構
自動車のワイパーが互いに干渉せずに動作するにはどうしたらいい? 今回は、回転運動をするクランク機構の応用例を解説。 無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
今回は設計公式を基にリンクの動作を計算する方法と、FreeCADの編集機能を使った設計を紹介する。今回のテクニックを応用すれば干渉チェックも可能だ。Excel計算シート付き! ミニチュア折りたたみイスを3Dプリンタで出力しよう
ミニチュア折りたたみイスを3Dプリンタで出力しよう
最終回は、ミニチュア折りたたみイスの3次元モデルの最終仕上げをした後、FabCafeへGo! 3Dプリンタで無事出力できるか? 記事中で、完成した3次元モデルのダウンロードもできる。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- Formlabsが新型3Dプリンタ「Form 4」発表、LFSを超えるプリントエンジンを採用
- 知らないと取り返しがつかなくなる金型の費用と作製期間の話
- 3σと不良品発生の確率を予測する「標準正規分布表」
- ムダのない作業と楽しさをもたらす“ありそうでなかった発想”
- 有限要素法入門 〜連立方程式の解法、変位の計算〜
- フローで考える流れのモデリング(その2) 〜適用例と3D/1Dの関係〜
- 幾何公差の基準「データム」を理解しよう
- Excelを使って周波数分析をやってみよう!
- 計算時間が従来比最大1000倍高速な流体解析ベースのトポロジー最適化ソフト
- 3D機構検証ソフトの最新版、干渉検証漏れ防止機能を搭載
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。