Vmech上で三菱電機製シーケンサとロボットコントローラー連動の仮想検証が可能に:生産設備検証の短期化を支援
シーケンサとモーションコントローラーを連動して検証できる環境が登場。生産設備検証リードタイム短縮が期待できる。
ラティス・テクノロジーは、同社の仮想シミュレータ「Vmech」で三菱電機MELSEC-Qシリーズとのインタフェースオプションに、ロボットコントローラー接続機能を追加、「MELSEC MotionSim Ver4.0」として2011年7月29日から発売する。
Vmechは、3次元CADデータを基に、製造設備などのメカトロニクス製品をラティス・テクノロジーが保有する画像軽量化フォーマットに変換、軽量化した上で、仮想的に機構の動作を検証するソフトウェア。実機製造前に制御プログラムの検証が可能なため、試作以降の工程短縮が見込める。
三菱電機のMELSECは、機器通信用ミドルウェアを「EZSocket」として提供しており、多様な周辺ソフトウェアとの接続が可能な点が特徴。同製品も通信部分はEZSocketを利用する。
MELSEC MotionSim Ver4.0では、従来、別々に検証していたシーケンサとモーションコントローラー、ロボットコントローラーをVmechに接続して複合的な検証ができるようになっている。これにより、実機では難しい限界条件テストや例外処理網羅テストを仮想環境下で事前に実施できるようになった。同じ環境上でワークの動作を含む検証も可能だ。
既存のMELSEC MotionSimユーザーで、Vmech本体の保守を継続利用している場合は追加費用なしで導入できる。同製品は、7月20〜22日開催の「TECHNO-FRONTIER 2011」(東京ビッグサイト)内「第4回メカトロニクス制御技術展」でデモ展示される予定。
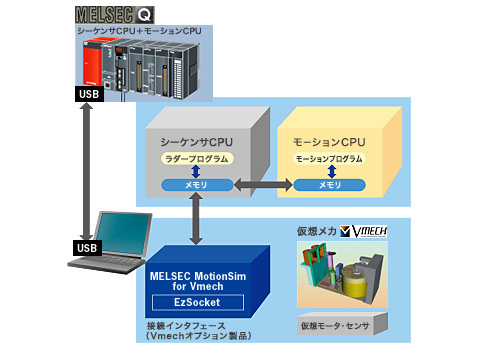 動作イメージ(三菱電機のWebページから抜粋)
動作イメージ(三菱電機のWebページから抜粋)モーションコントローラー・位置決めユニットからの指令でVmech上の仮想環境が動作する。仮想メカ上に配置したセンサー情報はPLCに返され、シリンダ類の駆動を行う
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 品質保証とは何か、その定義を改めて考える
- タイの半導体製造工場で新棟が完成、ソニーセミコンが生産力を強化
- 三菱重工が航空機エンジン部品工場を増強、内製力強化で完全一貫生産を実現
- パワー半導体の電流測定が正確に、光プローブを用いた電流波形測定用センサー
- ルネサスが甲府工場で300mmウエハーライン稼働、パワー半導体の生産能力を2倍に
- 日立産機が三菱電機 名古屋製作所の配電用変圧器事業を譲受、2026年4月に統合完了
- 工場でCO2排出量1次情報をなぜ取得すべきなのか 85%以上の削減効果も
- 誤差9割、コストを抑えるためにもCO2排出量は測った方がよい
- OTセキュリティを巡るエネルギー業界の法改正とは、変わる事業者の事故対応
- IEC 62443とは何か、工場のサイバーセキュリティ対策のカギを握る国際標準を解説



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。