
「超小型衛星を日本のお家芸に」~月面レースに挑む研究者、東北大・吉田教授(前編):再検証「ロボット大国・日本」(4)(1/2 ページ)
「超小型衛星」の分野で活躍中の東北大学・吉田和哉教授に、宇宙ロボットの最新状況を聞いた。
「宇宙開発」というと、国(宇宙航空研究開発機構:JAXA)や大企業だけのものと思っていないだろうか。答えは「ノー」だ。数トンにもなる大型衛星ならともかく、最近の「超小型衛星」と呼ばれる新しいタイプの衛星は大学やベンチャーによるものが多く、既に何機もが宇宙に飛び立っている。その最前線で活躍中の東北大学・吉田和哉教授に、宇宙ロボットの最新状況を聞いた。
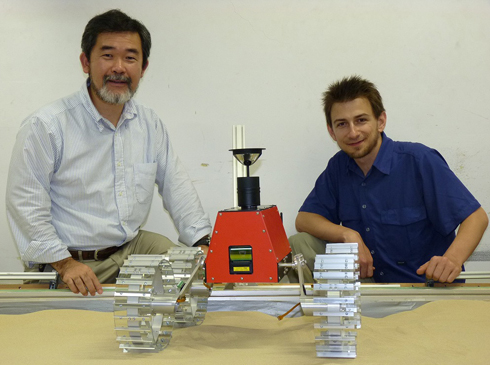 吉田和哉教授(左)とローバー担当のNathan Britton氏(右)。Google Lunar X PRIZEの月面ローバーについては後編でお伝えする
吉田和哉教授(左)とローバー担当のNathan Britton氏(右)。Google Lunar X PRIZEの月面ローバーについては後編でお伝えする超小型衛星とは何ぞや?
「“超小型”衛星なのだから小さいのだろう」というのは何となく分かるが、どのくらい小さいのか。明確な定義があるわけではないのだが、一般的には、大きさが50cm角、重さが50kgくらいまでの衛星を指すことが多い。この中でもさらに小さな10cm角のものは、別に「キューブサット」と呼ばれることもある。わざわざ“超小型”としているのは、100~500kgくらいの“小型”衛星と区別するためだ。
超小型衛星の開発は、もともとは教育目的で始まったものだ。衛星開発というものは、電子系も機械系もソフトウェアも必要で、まさに工学系の総合力が試されるものであるし、メンバー間の連携やプロジェクトマネジメントも重要(このあたりはロボコンに似ている)となる。規模的に、企画の立ち上げから運用まで1~2年程度の短期間でプロセスを一通り経験できるのもちょうどいい。それに小さいとはいえ、本物の“衛星”である。自分たちが作ったモノが宇宙に行くとなれば、学生が燃えないわけがない。やる気を引き出すには、格好のテーマだといえる。
このように教育向けに始まった超小型衛星であるが、近年、実用にも使えるのではないかという可能性が見えてきた。キューブサットでは小さ過ぎたが、50cmクラスになるとそれなりの観測装置を複数搭載することも可能になった。これは、民生技術の進歩により、小さくても高性能なものが作れるようになったということが背景にある。実際に、アクセルスペースという大学発のベンチャーが誕生し、ウェザーニューズから超小型衛星の開発を受注した例もある。
数トンクラスの大型衛星の開発には数百億円という巨額のコストが掛かる。これでは新規参入にはリスクが大き過ぎ、既にビジネスとして成り立っている通信・放送・地球観測などのプロバイダーや国くらいしかお客には付かない。しかし、超小型衛星なら数億円での開発が可能。このくらいであれば、一企業にとっても現実的な予算だ。ビジネスモデル次第では、ウェザーニューズのように“マイ衛星”を持とうという企業も増えてくるかもしれない。
超小型衛星は今、まさに黎明期にいるのだ。これからマイクロソフトが生まれるのかグーグルが生まれるのか、それとも一時的なブームとしてフェードアウトするのか。結局は魅力的な「新しい使い方」を創出できるかどうか、そこにかかっているだろう。
失敗を糧に新型機を開発
東北大学・吉田和哉教授がプロジェクトリーダーとして開発したのが「雷神(SPRITE-SAT)」である。この衛星の目的は、理学的には、落雷に伴う高層大気発光現象である「スプライト」を観測してナゾを解明すること。工学的には、同大学の超小型衛星の初号機ということもあって、設計や要素技術などを実証する狙いもあった。JAXAの温室効果ガス観測技術衛星「いぶき(GOSAT)」の相乗り衛星として、2009年1月23日に打ち上げられた。
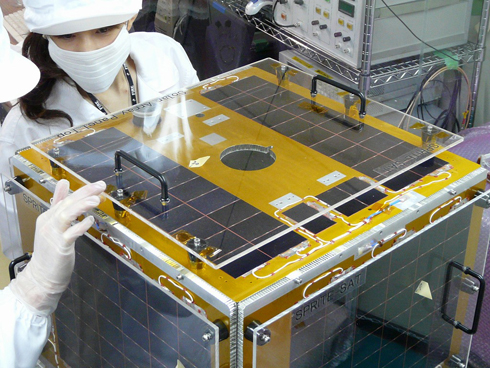 東北大学が理工の協力で作り上げた初代「雷神(SPRITE-SAT)」
東北大学が理工の協力で作り上げた初代「雷神(SPRITE-SAT)」しかし打ち上げから13日目、トラブルが起きた。地上からのコマンドが全く通らなくなってしまったのだ。衛星からの電波は出ているが、地上からの指示を受け付けない状態。試験モデルを使って解析したところ、電源系にトラブルが起きて、コントローラがハングアップしていることが分かった。もしリセットがかかればリブートして正常に動作する可能性はあるが、電圧は不安定ながらリセットがかかるほど低下していなかった。
この状況が続き、残念ながらスプライト現象の観測はできていないが、吉田教授は「最初から衛星トラブルの対処の仕方も勉強できたとポジティブに考えています」と笑う。
電源系は、設計段階から抱えていた問題を見過ごしていたのが原因だった。今年(2011年)完成した後継機「雷神2」では、バッテリーの充放電回路を強化。また、超小型衛星では部品に民生品を使う場合が多いのだが、コントローラのFPGAは信頼性の高い宇宙用部品を使っていた(ただし高価)。それもあって、「壊れないだろうという過信もあった。ここに異常が起きたときに回復する機能を持っていなかったので、雷神2では一定期間反応がないときにリセットするような仕組みを入れた」(吉田教授)という。
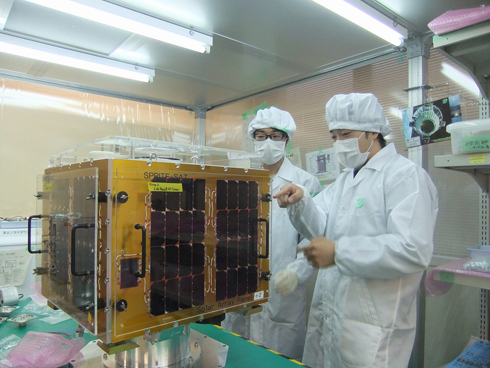 完成した後継機「雷神2」。高度約700kmの地球周回軌道に投入される予定
完成した後継機「雷神2」。高度約700kmの地球周回軌道に投入される予定この雷神2では、スプライト観測に再挑戦するだけでなく、新たに地表撮影のための望遠鏡も搭載した。これは口径10cm、焦点距離1mの反射望遠鏡。小型ながら5mの地上分解能を目指したもので、今回独自に開発した。地上分解能は、最新の商用衛星でも40~50cmといったあたり。まだ1桁違うとはいえ、それに近いスペックを、はるかに小さい(雷神2はたった41kg)衛星で実現しようというのだ。
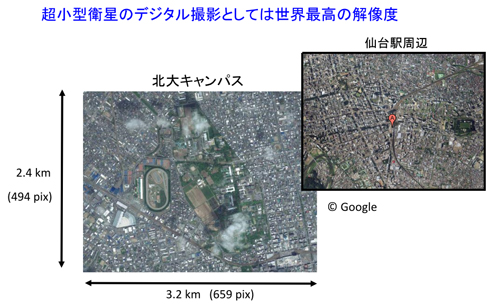 5mの地上分解能が実現できれば、撮影画像はこのようなイメージになる
5mの地上分解能が実現できれば、撮影画像はこのようなイメージになる「雷神2」に搭載された最新技術
超小型衛星は低コスト・短期間での開発が可能であるため、積極的に新しい技術にもチャレンジできるのが特徴。「失敗してもいい」とはいわないが、もし失敗したとしても再チャレンジが容易なのだ。
雷神2には、以下のような要素技術が搭載された。
セラミックスミラー
反射望遠鏡のミラーには、通常は低熱膨張ガラスが使われているが、雷神2ではこれにZPFセラミックスを採用。熱膨張が極めて小さく、熱変化による像の歪み(ひずみ)を抑えることができる。これは仙台市の日本セラテックが開発した。
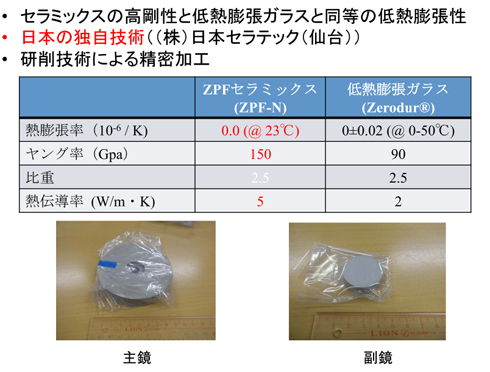 セラミックスミラー
セラミックスミラー液晶波長可変フィルター
通常、観測用のカメラには、必要な波長だけを通すようなフィルターが設けられている。複数の波長を観測する場合には、複数のカメラを搭載するか、あるいはフィルターホイールを使ってフィルターを切り替えることになるが、雷神2では波長を電気的に制御できる液晶波長可変フィルターを搭載。650~1050nmの間で、1nm刻みで波長を細かく制御することが可能だ。これは青森県のアスミタステクノロジーが開発した。
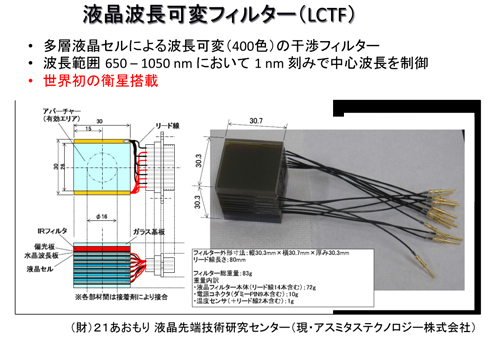 液晶波長可変フィルター
液晶波長可変フィルターリアクションホイール
雷神2は超小型衛星ながら、姿勢制御のためにリアクションホイールを搭載した。リアクションホイールは、内部の円盤の回転速度を変化させることで、衛星の向きを自由に変えられる装置。マクソン製のモーターを使って、3軸分をインハウスで開発した。独自開発した理由の1つには、宇宙でモーターを動かす技術は「月面ローバーにもつながる」(吉田教授)ということもあった。
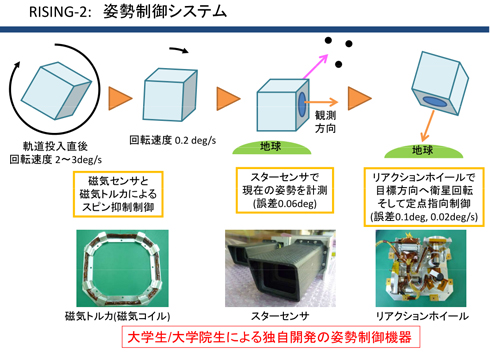 リアクションホイール
リアクションホイールCopyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -



Special Contents 2
- PR -

Special Site
- PR -

Pickup Contents
- PR -

コーナーリンク
組み込み開発の記事ランキング
- 車載マイコンで快走のインフィニオン、なぜRISC-Vを採用するのか
- イチから全部作ってみよう(19)今までの知識を総動員して要求仕様書を作成する
- Rapidusと連携深めるテンストレント、東京オフィスで半導体エンジニアを積極育成
- ブレッドボードの表裏を使ってFPGA評価ボードの万能UI「dpad」を新生させる
- CAN通信におけるデータ送信の仕組みとは?
- 水深300mまで使用できるプロフェッショナル向け新型圧力センサー
- CANプロトコルを理解するための基礎知識
- IoTデバイスの遠隔制御機能を提供、多数デバイスの一括指示も可能
- 米中が先行する汎用ロボット、日本がロボット大国に返り咲くには何が必要なのか
- Visual SLAMをベースとした自律運転ソフトウェアがGEクリエイティブのAMRに採用



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。