
ケンケン、手酌、聖徳太子!? ――自律性と状況適応能力が向上、新型ASIMO誕生:自律行動制御技術を新たに搭載
ホンダは、知的能力・身体能力・作業機能を向上させたヒューマノイドロボット「新型ASIMO」を発表した。従来の「自動機械」から「自律機械」へと進化を遂げたという。
ホンダは2011年11月8日、自律行動制御技術を新たに搭載したヒューマノイドロボット「新型ASIMO」を発表した。
新型ASIMOは、周囲の人の動きに合わせて自ら行動する“判断能力”を備えたことで、従来の「自動機械」から「自律機械」へと進化したという。具体的には、(1)とっさに足を出して姿勢を保つ「高次元姿勢バランス」、(2)周囲の人の動きなどの変化を複数のセンサーからの情報を総合して推定する「外界認識」、(3)集めた情報から予測して、人の操作の介在なしに自ら次の行動を判断する「自律行動生成」の3つを実現する技術を開発し、搭載した。
 新型ASIMO
新型ASIMOまた、知能面での能力も向上している。今回、人間の視覚や聴覚、触覚などに相当する各種センサーからの入力情報を総合的に判断し、周囲の状況推定や、自身の対応行動の決定など、知能化の基盤技術となるシステムを新たに開発。これにより、行動途中であっても、相手の反応に応じて別の行動に変更するなど、人の動きや状況に合わせた応対が可能になったという。
さらに、視覚センサーと聴覚センサーを連動させることで、顔と音声を同時に認識することが可能となり、人間では難しい、複数人の発話を同時に聞き分けることができるようになった。他にも、あらかじめ空間センサーを設置しておくことで、人の歩く方向を数秒先まで予測でき、自らの移動予測位置と、衝突する場合は別経路を生成して歩くこともできる。
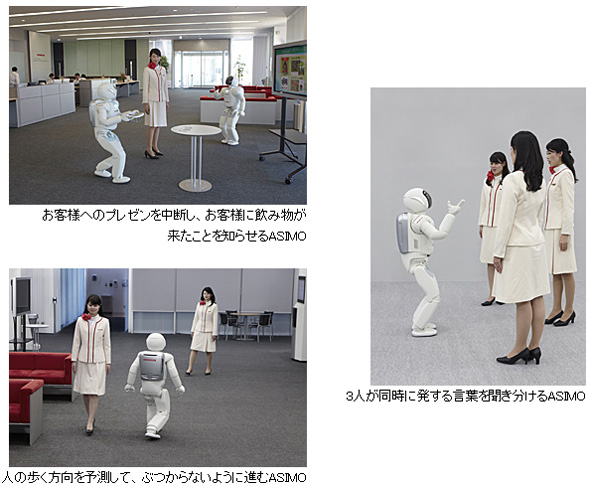 新型ASIMOの知的能力の進化。各種センサーからの入力情報を総合的に判断し、周囲の状況推定や、自身の対応行動の決定など、知能化の基盤技術となるシステムを新たに開発
新型ASIMOの知的能力の進化。各種センサーからの入力情報を総合的に判断し、周囲の状況推定や、自身の対応行動の決定など、知能化の基盤技術となるシステムを新たに開発新型ASIMOは身体能力も向上した。従来よりも脚力が向上し、脚の可動域を拡大したことに加え、着地位置を動作中に変更できる新たな制御技術を取り入れたことで、歩行や走行、バック走行、片足ジャンプ(ケンケン)、両足ジャンプなどを連続して行えるようになった。こうした身体機能の向上により、デコボコのある路面でも安定姿勢を保って踏破するなど、変化する外部の状況に柔軟に適応できるようになったとのこと。
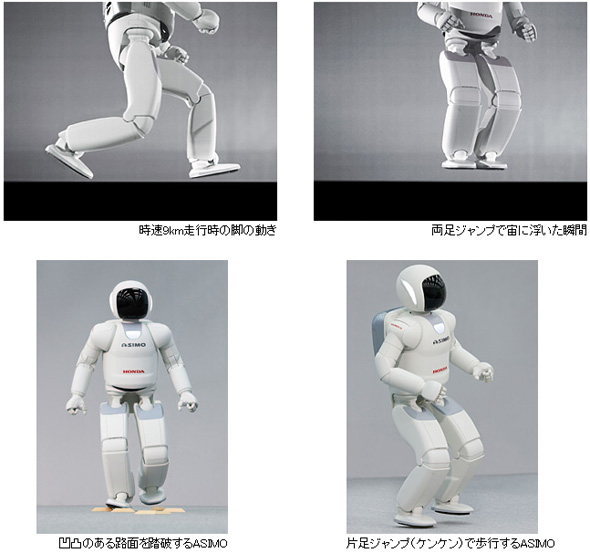 新型ASIMOの身体能力の進化。歩行や走行、バック走行、片足ジャンプ(ケンケン)、両足ジャンプなどを連続して行える
新型ASIMOの身体能力の進化。歩行や走行、バック走行、片足ジャンプ(ケンケン)、両足ジャンプなどを連続して行えるまた、手のひらには触覚センサーが、5本の指にはそれぞれ力センサーが内蔵され、各指を独立して制御する高機能小型多指ハンドを開発。新型ASIMOでは、これら技術と、視覚・触覚を合わせた物体認識技術を組み合わせることで、例えばビンを手に取ってフタをひねる、液体が注がれる柔らかい紙コップをつぶさずに把持するなどの作業を器用に行うことが可能となった。
 作業能力が向上した新型ASIMO。(左)水筒を握り、ふたを開け、紙コップに水を注ぐ、(右)手話で“家族”を表現をする
作業能力が向上した新型ASIMO。(左)水筒を握り、ふたを開け、紙コップに水を注ぐ、(右)手話で“家族”を表現をする以下に、新型ASIMOの主な仕様を示す。
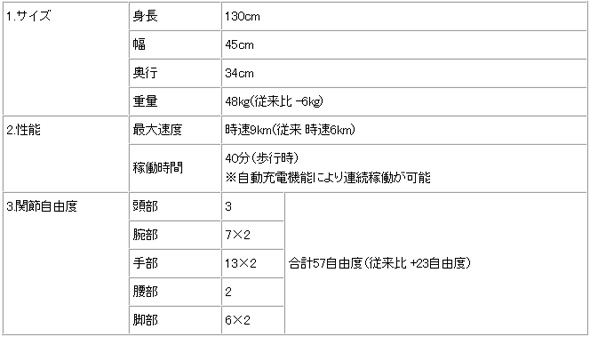 新型ASIMOの主な仕様
新型ASIMOの主な仕様同社は、ASIMOに代表されるヒューマノイドロボット研究から生まれるロボティクス技術と応用製品の総称を「Honda Robotics」と定め、ロゴマークを設定した。今後もヒューマノイドロボット研究を継続していくと同時に、量産製品への転用や応用製品の実用化にも積極的に取り組んでいくという。
今回、ASIMOの研究開発で培った「多関節同時軌道制御技術」と「姿勢制御技術」を応用し、人が立ち入れない危険な場所や、足場が不安定な場所で作業を行う「作業アームロボット」の試作機も併せて公開している。また、既に発表されたアシストロボットなども同社のヒューマノイドロボット研究の応用成果の1つだ。
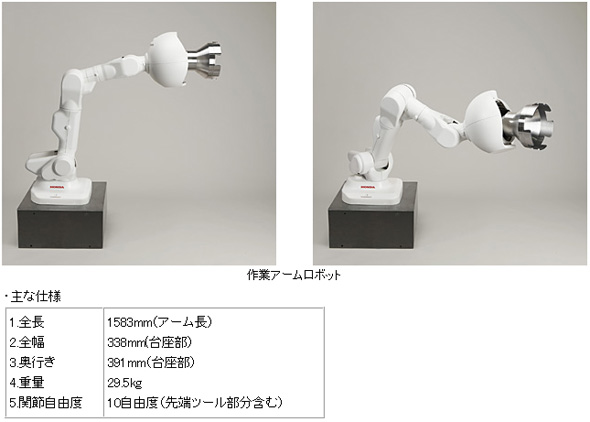 作業アームロボット
作業アームロボットロボット/ロボット開発 コーナー

 介護・医療をアシスト! トヨタがパートナーロボット4種を開発――2013年以降の実用化へ
介護・医療をアシスト! トヨタがパートナーロボット4種を開発――2013年以降の実用化へCopyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -



Special Contents 2
- PR -

Special Site
- PR -

Pickup Contents
- PR -

コーナーリンク
組み込み開発の記事ランキング
- 車載マイコンで快走のインフィニオン、なぜRISC-Vを採用するのか
- イチから全部作ってみよう(19)今までの知識を総動員して要求仕様書を作成する
- Rapidusと連携深めるテンストレント、東京オフィスで半導体エンジニアを積極育成
- VS Codeとの連携に対応、生成AI活用機能を追加したソースコード解析ツール
- 「カチャカプロ」の兄貴分!? 可搬重量最大100kgの新モデルを披露
- CAN通信におけるデータ送信の仕組みとは?
- ブレッドボードの表裏を使ってFPGA評価ボードの万能UI「dpad」を新生させる
- 水深300mまで使用できるプロフェッショナル向け新型圧力センサー
- CANプロトコルを理解するための基礎知識
- テスト消化曲線とバグ発生曲線の7パターン診断
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。