マイクロマウス組み立てキットによる電子工作のイロハ:マイクロマウスで始める組み込み開発入門(2)(4/4 ページ)
Pi:Co Classicは、電源基板、メイン基板、センサー基板、CPU基板という4枚の基板を使用します。まずは、部品点数が少ない電源基板を作成しましょう(画像7、8)。
電源基板
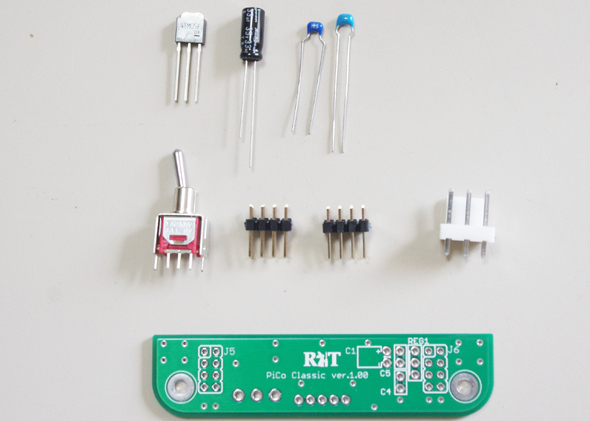 画像7 電源基板は部品点数が少ない。次に作るメイン基板と併せて動作確認を行えるので最初に作るべき
画像7 電源基板は部品点数が少ない。次に作るメイン基板と併せて動作確認を行えるので最初に作るべき電源基板の作成では、特に次の3つの点に注意してください。
- 三端子レギュレータと電源コンデンサの極性
- 2種類あるセラミックコンデンサ(シールのC4に0.01μF、C5に0.1μFをはんだ付けする)
- コネクタと電源スイッチは裏面に取り付ける
 画像8 完成した電源基板
画像8 完成した電源基板メイン基板
メイン基板は部品点数が多くなります。マニュアルに従い、順に取り付けていきます。
一般的に、はんだ付けする際は、背の低い部品から順番に付けていきます。つまり、抵抗を全て付けてから、次にコンデンサを付けて……という手順になります。けれど、Pi:Co Classicのマニュアルでは、機能ごとにはんだ付けをするように説明されています。
これに従うと、最初にLEDと抵抗をはんだ付けすることになります。そして次に、タクトスイッチと抵抗……という手順です。単に「電子工作」として考えた場合、この順番はイレギュラーですし、作業効率も悪くなります。しかし、こうして機能ごとにはんだ付けをしていくことで、「LEDを光らせるためには、抵抗が必要なんだなぁ」「モータドライバICには、電解コンデンサが必要なんだなぁ」と、機能を実現するために必要な電子部品について自然と理解できます。
抵抗 → コンデンサ → LED → ……と、背の低い部品から流れ作業ではんだ付けをしていったら、どの部品とどの部品が関係しているのかが見えてきませんよね。機能単位で作業しておけば、この段階で回路が分からなくても、後日、Pi:Co Classicの回路を解析しようと思ったときにきっと役立つでしょう。
ただし、背の高い部品の後に小さな部品をはんだ付けする場合は、部品を仮止めするちょっとした工夫が必要になります(画像9、10)。
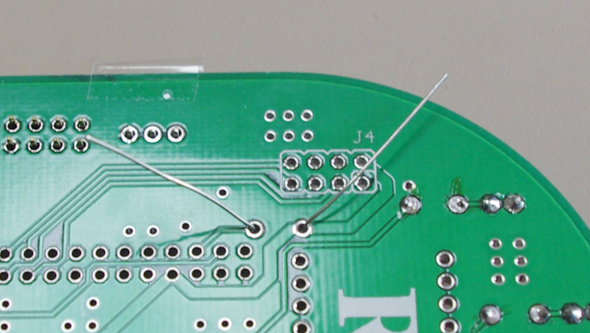 画像9 抵抗は、スルーホールに通したリードを軽く曲げて、固定してからはんだ付けを行う
画像9 抵抗は、スルーホールに通したリードを軽く曲げて、固定してからはんだ付けを行う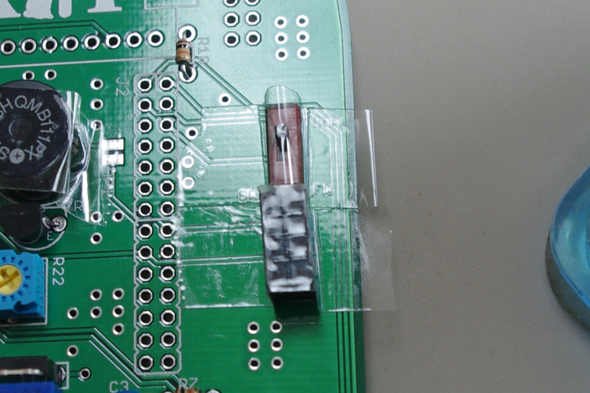 画像10 背の高い部品はセロハンテープで仮止めして、垂直にはんだ付けする
画像10 背の高い部品はセロハンテープで仮止めして、垂直にはんだ付けするメイン基板で注意すべき点は、電子ブザーの両脇にあるOP1、OP2をそれぞれはんだでショートさせるところです(画像11)。
画像11のAのように、2つのはんだジャンパがあります。まず、それぞれにはんだを少量盛り付けます(画像11のB)。そして、2つの盛りはんだを溶かすようにはんだごてを当てればOKです。
 画像11 OP1とOP2をショートさせることにより、シリアルUSB変換基板とSH2基板を接続しています
画像11 OP1とOP2をショートさせることにより、シリアルUSB変換基板とSH2基板を接続していますメイン基板が完成したら、電源基板の動作確認を行います。電源基板とメイン基板をピンヘッダでつなぎ、バッテリーを接続します。そして、スイッチをONにして、赤色LEDが光ればOKです(画像12)。
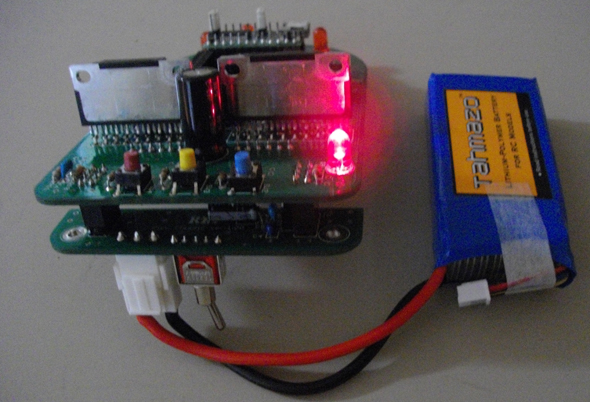 画像12 電源基板の動作確認。LEDが光れば、正しくできている
画像12 電源基板の動作確認。LEDが光れば、正しくできているセンサー基板/CPU基板
センサー基板で注意すべきなのは、フォトトランジスタとLEDの取り付けです。
センサー基板は“壁を見る”役割を担います。そのため、リードを曲げて、基板に対し、部品を寝かせた状態で取り付けなければなりません。また、極性がありますから、左右対称になるよう「曲げる方向」にも注意してください(画像13)。組み立て後に、センサー位置の微調整を行うため、部品を基板から2mm程度浮かせてはんだ付けします。
画像14のように、基板を挟んで下面にフォトトランジスタ、上面にLEDをはんだ付けします。
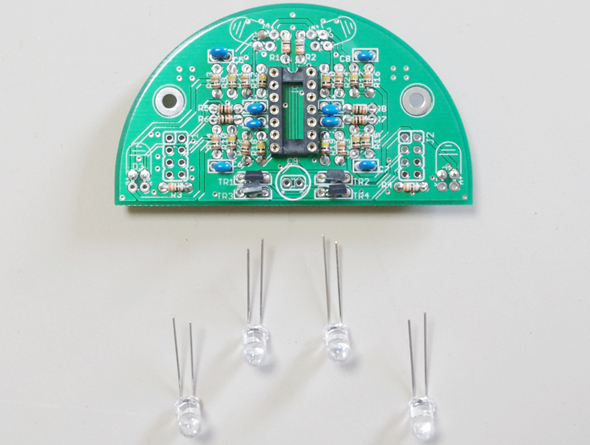 画像13 極性が左右対称になるようにLEDのリードを曲げる。リードの長さに注目!
画像13 極性が左右対称になるようにLEDのリードを曲げる。リードの長さに注目!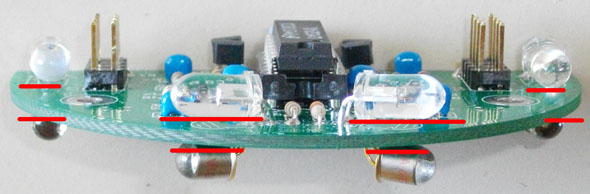 画像14 先にフォトトランジスタ、次にLEDをはんだ付けする。これが「マイクロマウスの目」になる。部品は、基板から約2mmの遊びを持たせてはんだ付けを行う(画像の赤線部分)
画像14 先にフォトトランジスタ、次にLEDをはんだ付けする。これが「マイクロマウスの目」になる。部品は、基板から約2mmの遊びを持たせてはんだ付けを行う(画像の赤線部分)CPU基板は、ピンヘッダを取り付けるだけです。短いリードがマイコン側にきます。全てのピンをはんだ付けしましょう(画像15)。
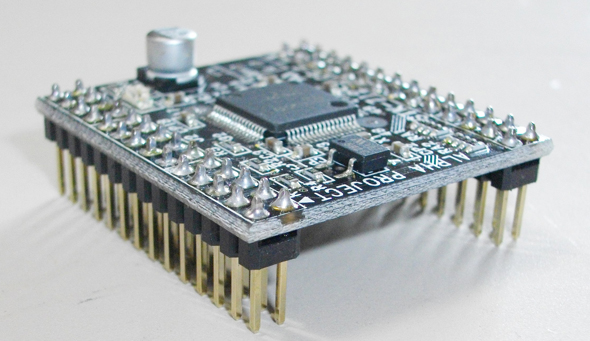 画像15 CPU基板。ピンヘッダの向きに気を付けて、垂直に取り付ける
画像15 CPU基板。ピンヘッダの向きに気を付けて、垂直に取り付ける
で、できましたーっ!

よくガンバったね。初めてにしては、上出来だよ。

さあ、後は組み立てるだけですね!!

うん。でも、その前に「ケーブル」を作らなくちゃね!

えぇ〜。まだ、あるんですか……。
そう。それで組み立てたら、今度は開発環境をインストールして、それから動作チェックするんだよ。

き、北上センパイ。今日は、ここまでにしませんか?
ワタシ、もうお腹ペコペコですよー。

よし! じゃあ、牛丼でも食べに行こう!!

わ、わーい(棒読み)。
さて次回は、マイクロマウスを組み立てて、開発環境をインストールします。そして、今回えみちゃんが頑張ってはんだ付けした基板がきちんと動くかどうか、動作テストで確認してみます! ご期待ください。(次回に続く)
ロボット/ロボット開発 コーナー
 ,/mn/subtop/features/robot/
,/mn/subtop/features/robot/関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CAN通信におけるデータ送信の仕組みとは?
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CANプロトコルを理解するための基礎知識



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。