走れ、マイクロマウス!! 迷路攻略、完走する日を夢見て:マイクロマウスで始める組み込み開発入門(4)(3/4 ページ)
ここまで順調だった北上くんとえみちゃんのPi:Co Classicですが、トラブルが発生してしまいました!
これが例えば、買ってきたTVのリモコンであれば「センサーが壊れている! 返品、返品!!」と言ってもいいかもしれませんが、今回は、自分たちではんだ付けしたロボットです。「センサーが壊れた」だけで済ますわけにはいきません。その原因を調べる必要があります。
Pi:Co Classicは、動作確認済みの市販の組み立てキットですから、回路自体に問題はないでしょう。となると、チェックする項目は限られてきます。
トラブルが発生した場合は、冷静に判断し、考えられる原因を1つずつ確認していきましょう。以下、代表的なトラブルの原因です。
- 部品の極性を間違えた
- はんだ不良
- 抵抗の値を間違えた
- 部品の初期不良
では、確認しやすいところから、順に見ていきましょう。連載第2回で掲載したように、フォトトランジスタには“極性”があります(詳しくはこちら)。「E(エミッタ)」と「C(コレクタ)」を逆にしていないでしょうか? はんだ付けはちゃんとできているでしょうか?(画像7)
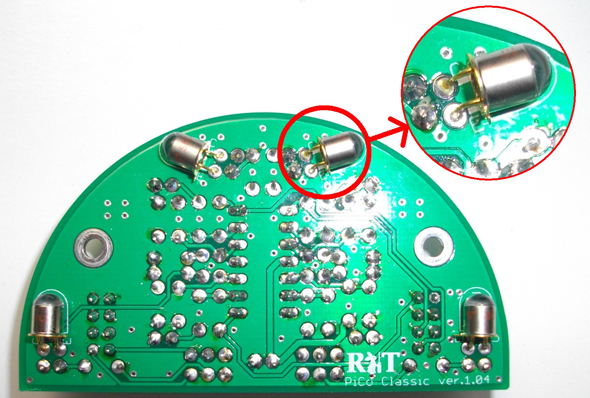 画像7 突起がある方が「E(エミッタ)」。正しく付いていた。はんだもちゃんと付いているように見える
画像7 突起がある方が「E(エミッタ)」。正しく付いていた。はんだもちゃんと付いているように見えるどうやら問題なさそうです。それでは次の箇所を見ていきましょう。
抵抗の値を間違えていると、回路が正常に動きません。組み立てマニュアルや回路図を参考にして、センサー基板の抵抗を確認してみます(画像8)。
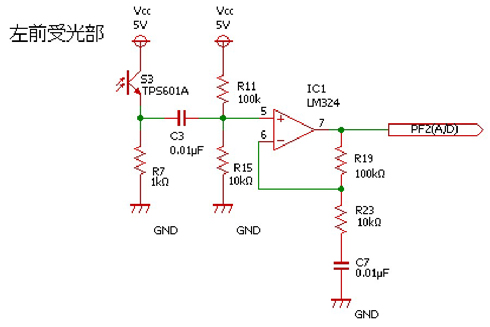 画像8 「Technical Data」ディレクトリ内に基板の回路図が入っている。これは、前方左センサー部分の回路図。実際に基板と照らし合わせて、各抵抗の値をチェック。全て正しく付いていた
画像8 「Technical Data」ディレクトリ内に基板の回路図が入っている。これは、前方左センサー部分の回路図。実際に基板と照らし合わせて、各抵抗の値をチェック。全て正しく付いていたここまでの点検では、回路トラブルの原因になりそうなものは見つかりませんでした。「じゃあ、フォトトランジスタが初期不良!?」と、考えるのは早計です。まだ、回路全体のはんだ付けをチェックしていません。
はんだ作業の際、抵抗はリードを軽く曲げて仮固定してはんだ付けしました。Pi:Co Classicの基板は、ホール間隔が狭いので、ひょっとするとリードを曲げ過ぎて、隣と接触してしまっているかもしれません。
ルーペを使って、怪しいところがないか隅々までじっくりとチェックしましょう。
おやっ!? どうやら今回は、はんだミスが誤動作の原因だったようです(画像9)。
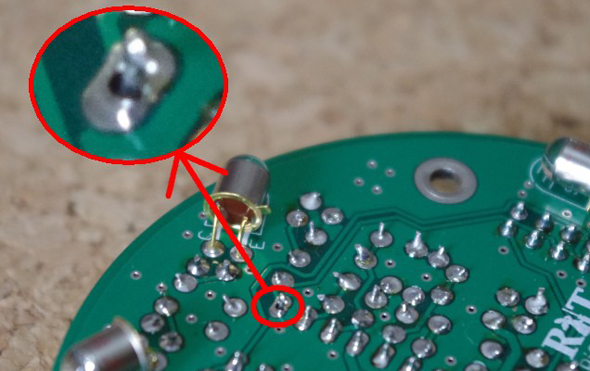 画像9 ICのリードが1箇所、はんだ付けされていなかった!! はんだ付けしたら、l_senも無事に動くことが確認できた
画像9 ICのリードが1箇所、はんだ付けされていなかった!! はんだ付けしたら、l_senも無事に動くことが確認できた初めての電子工作では、作ったものがすぐにちゃんと動くことの方がまれです。市販キットであれば動作確認済みなので、動かない時はどこかにミスがあるはずです。焦らずに腰を据えて原因を探しましょう!
モータの動作確認

ちゃんとはんだ付けしたつもりだったのに……。

はんだ不良は、よくあるミスだよ。
そーなんですか……?
今回は、分かりやすいミスでよかったよ! 不良箇所を見つけるのに丸1日かかることだってあるんだから!

うわぁ……。
基板が動かないとき、どうやって原因を見つけるのかはある程度の知識と経験が必要だね。

そうですね(ふぅ)。

さぁ、最後にモータの動作をチェックしよう!
は〜い(今度は動くといいなぁ……)。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 景気減速でソフト開発の脆弱性対応が後手に? SBOM整備の取り組みも足踏みか
- CANプロトコルを理解するための基礎知識
- 低価格FPGAでも文字認識AIの学習は可能なのか
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- 【問題7】10進数を2進数に変換するプログラム
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。