儘儃僢僩傪墦妘憖嶌偟丄桪偟偔丒慺憗偔丒埨慡偵媬彆偣傛!! 乗乗14僠乕儉偑儗僗僉儏乕妶摦偵挧愴丗inrevium攖 戞12夞儗僗僉儏乕儘儃僢僩僐儞僥僗僩乮1/2 儁乕僕乯
儘儃僢僩偑楬忋偺僈儗僉傪墴偟偺偗丄憱楬傪妋曐偟偮偮丄梫媬彆幰偺壓傊偲媫峴偡傞乗乗丅2012擭8寧11丄12擔偺2擔娫丄恄屗僒儞儃乕儂乕儖偱乽inrevium攖 戞12夞儗僗僉儏乕儘儃僢僩僐儞僥僗僩乿偑奐嵜偝傟偨丅杮峞偱偼丄戝夛奣梫偲寢壥傪偍撏偗偡傞丅
丂乽僗儕乕丄僣乕丄儚儞乧乧丄儗僗僉儏乕妶摦奐巒両乿乗乗丅巜椷偑敪椷偝傟傞偲摨帪偵丄婎抧乮儘儃僢僩儀乕僗乯偐傜師乆偲儘儃僢僩偑嵭奞尰応傊岦偗偰弌摦丅楬忋偺僈儗僉傪墴偟偺偗丄憱楬傪妋曐偟偮偮丄梫媬彆幰偺壓傊偲媫峴偡傞乧乧丅
丂偲偄偭偰傕丄偙傟偼尰幚偺嵭奞尰応偺榖偱偼側偄丅偐偲偄偭偰丄嬤枹棃偺偍榖偱傕側偄丅2012擭8寧11丄12擔偺2擔娫丄恄屗僒儞儃乕儂乕儖偱奐嵜偝傟偨乽inrevium攖 戞12夞儗僗僉儏乕儘儃僢僩僐儞僥僗僩乮埲壓丄儗僗僐儞乯乿偺杮慖偱偺堦枊偩丅


丂戞12夞戝夛偺寢壥傪偍揱偊偡傞慜偵丄儗僗僐儞偺奣梫偵偮偄偰娙扨偵愢柧偟傛偆丅
儗僗僉儏乕儘儃僢僩僐儞僥僗僩奐嵜偺攚宨偵偁傞傕偺
丂2011擭3寧11擔偵敪惗偟偨搶擔杮戝恔嵭埲棃丄儗僗僉儏乕儘儃僢僩偺尋媶奐敪偲偦偺妶摦偼丄堦斒偐傜傕懡偔偺拲栚傪廤傔傞傛偆偵側偭偨丅
丂恔嵭捈屻偼丄奀奜偺儘儃僢僩偑峴曽晄柧幰偺憑嶕傗旐奞忬嫷偺挷嵏側偳偱妶桇偟偨偙偲傕偁傝丄懡偔偺儊僨傿傾偱傕庢傝忋偘傜傟丄榖戣偵忋偭偨丅偦偺嵺丄堦晹偐傜偼乽亀儘儃僢僩戝崙擔杮亁傪宖偘偰偄傞偔偣偵丄崙嶻偺儗僗僉儏乕儘儃僢僩偑妶桇偟偰偄側偄偱偼側偄偐両乿偲偄偆旕擄偺惡傕婑偣傜傟偰偄偨丅偟偐偟丄幚嵺偵偼丄奀奜偺儘儃僢僩偲摨偠傛偆偵丄崙嶻儘儃僢僩傕妶摦傪巒傔偰偍傝丄抧摴偵惉壥傪嫇偘偰偄傞偺偩丅幚偼丄偙偆偟偨崙嶻儘儃僢僩偺妶桇傪堿偱巟偊傞庢傝慻傒偺1偮偑丄偙偺儗僗僐儞側偺偱偁傞丅

丂偦傕偦傕丄儗僗僐儞偑敪懌偟偨偒偭偐偗偼丄1995擭1寧17擔偵敪惗偟偨嶃恄丒扺楬戝恔嵭偵偁傞丅偁偺戝恔嵭偺偲偒偵偼丄偳偙偐傜傕儗僗僉儏乕儘儃僢僩偑媬彆偵棃偰偔傟側偐偭偨乧乧丅
丂摉帪丄恟戝側旐奞傪庴偗偨恄屗巗挿揷嬫偵嵼廧偟偰偄偨恄屗戝妛偺偁傞愭惗偼丄帺傜抧堟偺媬彆妶摦偵摉偨傝側偑傜丄乽側偤丄亀僒儞僟乕僶乕僪乮拲乯亁偑彆偗偵棃偰偔傟側偄傫偩両乿偲怱偺掙偐傜巚偭偨偦偆偩丅
丂偁偺摉帪丄儗僗僉儏乕儘儃僢僩偑彆偗偵棃傜傟側偐偭偨偺偵偼帠忣偑偁傞丅幚偼丄偦傟傑偱偼丄儗僗僉儏乕儘儃僢僩傪尋媶偟偰偄傞尋媶幰偑偄側偐偭偨偺偩丅嶃恄丒扺楬戝恔嵭偼丄1948擭6寧28擔偵敪惗偟偨暉堜抧恔埲棃丄擔杮崙撪偱47擭怳傝偵敪惗偟偨戝恔嵭偩偭偨丅
丂儘儃僢僩岺妛偑惗傑傟偨偺偼1950擭戙偺偙偲丅暉堜抧恔偺敪惗偼丄儘儃僢僩岺妛偑抋惗偡傞埲慜偺偙偲偱偁傝丄嶃恄丒扺楬戝恔嵭偼擔杮偺儘儃僢僩尋媶幰偑弶傔偰懱尡偡傞戝恔嵭偩偭偨丅偦偺偨傔丄偦傟傑偱偼尋媶幰偺堄幆偑儘儃僢僩岺妛偲儗僗僉儏乕傪寢傃晅偗傞曽岦偵偄偐側偐偭偨偺偩偲偄偆丅
丂帺傜儗僗僉儏乕儘儃僢僩傪尋媶偟丄奐敪偟側偄尷傝丄偄偞偲偄偆偲偒偵僒儞僟乕僶乕僪偼彆偗偵偒偰偔傟側偄乗乗丅嶃恄丒扺楬戝恔嵭傪捠偠丄偦偺偙偲偑柧傜偐偵側偭偨偨傔丄桳巙偑廤偄儘儃僢僩岺妛偲杊嵭岺妛傪梈崌偟丄乽儗僗僉儏乕岺妛乿傪採尵丅偦偟偰丄崙嵺儗僗僉儏乕僔僗僥儉尋媶婡峔乮IRS丗International Rescue System乯傪2002擭偵愝棫偟偨丅
丂偙偆偟偨堦楢偺妶摦偺拞偐傜惗傑傟偨偺偑丄偙偺儗僗僐儞偩丅儗僗僉儏乕岺妛偺棫偪忋偘偐傜丄幚梡揑側儘儃僢僩偑抋惗偡傞傑偱偵偼丄挿偄擭寧偑偐偐傞丅偦偟偰丄尋媶傪宲懕偡傞偨傔偵偼丄庒庤媄弍幰偺堢惉傕晄壜寚偱偁傞丅
丂偦偙偱丄師悽戙偺尋媶幰丒媄弍幰傪堢偰傞偨傔偺庤抜偲偟偰丄崅峑惗傗崅愱惗丄戝妛惗偲偄偭偨庒偄悽戙偑嫽枴傪帩偪丄帺敪揑偵庢傝慻傓壽戣偲偟偰儗僗僐儞傪棫偪忋偘偨偺偩丅摨帪偵丄庒庤媄弍幰偺尋媶妶摦傪嫞媄夛偲偟偰娤媞偵斺業偡傞偙偲偱丄峀偔巗柉偵懳偟偰丄杊嵭丒尭嵭偺堄幆傪崅傔偰傕傜偆孾敪妶摦偲偟偰偺堄媊傕儗僗僐儞偵偼崬傔傜傟偰偄傞丅
丂偙偆偟偨巚偄偐傜抋惗偟偨嫞媄夛偱偁傞偨傔丄儗僗僐儞偺戝夛庯巪偵偼丄乬億僀儞僩傪憟偄桪彑傪嫞偆傕偺偱偼側偄偙偲乭偑慜採忦審偲偟偰柧婰偝傟偰偄傞丅
儈僢僔儑儞偼丄僟儈儎儞傪慺憗偔敪尒偟丄桪偟偔埨慡偵媬彆偡傞偙偲
丂嶲壛僠乕儉偼丄帺傜偺儗僗僉儏乕僐儞僙僾僩傪専摙偟丄偦傟傪幚尰偡傞偨傔偺傾僀僨傾傪僔僗僥儉愝寁偟丄儘儃僢僩偵傛傞儀僗僩側儗僗僉儏乕妶摦傪幚尰偟側偗傟偽側傜側偄丅偙傟偑戝夛偵偍偗傞堦斣偺栚揑偱偁傞丅
丂嫞媄偼丄壦嬻偺乽崙嵺儗僗僉儏乕岺妛尋媶強乿撪偵愝偗傜傟偨丄嵭奞尰応傪柾偟偨弅広6暘偺1僒僀僘偺巗奨抧柾宆僼傿乕儖僪乮幚尡僼傿乕儖僪乯偱幚巤偝傟傞丅僼傿乕儖僪偵偼丄曵傟偨壠壆傗僈儗僉偑嶶棎偟丄恖宍乮岞幃垽徧丗僟儈儎儞乯偑媬彆傪懸偭偰偄傞丅擇師嵭奞偺嫲傟偑偁傞偨傔丄恖娫偑棫偪擖傞偙偲偑偱偒側偄偲偄偆愝掕偩丅傛偭偰丄僠乕儉偵壽偣傜傟偨擟柋偼丄僆儁儗乕僞乕偑墦妘憖嶌偡傞儘儃僢僩偱丄僟儈儎儞傪慺憗偔敪尒偟丄桪偟偔媬彆偟偰埨慡側応強傊塣傇偙偲偩丅徻偟偄丄嫞媄撪梕丒儖乕儖偵偮偄偰偼丄儗僗僉儏乕儘儃僢僩僐儞僥僗僩偺岞幃Web僒僀僩乮嫞媄夛杮慖 嫞媄偵偮偄偰乯傪嶲徠偟偰傎偟偄丅
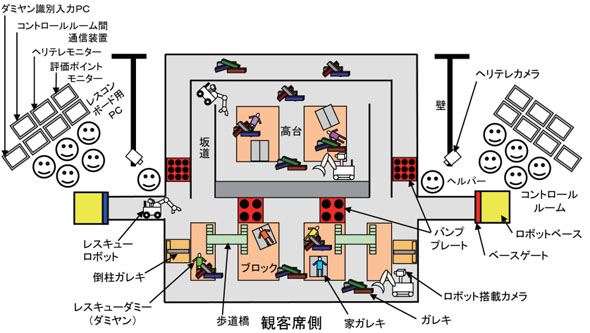 6暘偺1僒僀僘偺巗奨抧柾宆僼傿乕儖僪乮幚尡僼傿乕儖僪乯丅2僠乕儉摨帪偵1柺偺幚尡僼傿乕儖僪忋偱媬彆妶摦傪峴偆丅奺僠乕儉偺儘儃僢僩偼丄嵍塃偺儘儃僢僩儀乕僗偐傜弌摦偟丄儗僗僉儏乕妶摦帪娫乮12暘乯撪偵3懱偺僟儈儎儞傪楢傟婣傜側偗傟偽側傜側偄
6暘偺1僒僀僘偺巗奨抧柾宆僼傿乕儖僪乮幚尡僼傿乕儖僪乯丅2僠乕儉摨帪偵1柺偺幚尡僼傿乕儖僪忋偱媬彆妶摦傪峴偆丅奺僠乕儉偺儘儃僢僩偼丄嵍塃偺儘儃僢僩儀乕僗偐傜弌摦偟丄儗僗僉儏乕妶摦帪娫乮12暘乯撪偵3懱偺僟儈儎儞傪楢傟婣傜側偗傟偽側傜側偄
 乮嵍乯乽乮壦嬻偺乯亀崙嵺儗僗僉儏乕岺妛尋媶強亁撪偵愝塩偝傟偰偄傞乿偲偄偆愝掕偺幚尡僼傿乕儖僪丅奺僠乕儉偑丄傾僀僨傾傪嬅傜偟偨儘儃僢僩偱儗僗僉儏乕妶摦傪幚慔偡傞乛乮塃乯儗僗僐儞偺塭偺庡栶偱偁傞梫媬彆幰栶偺恖宍乽僟儈儎儞乿乮夋憸拞墰偺愒怓偺暈傪拝偨恖宍乯傪丄媬彆偟偰埨慡側応強傊斃憲丅僟儈儎儞偼懱撪偵搵嵹偝傟偨僙儞僒乕偱丄媬彆帪偺捝傒傪悢抣壔偡傞
乮嵍乯乽乮壦嬻偺乯亀崙嵺儗僗僉儏乕岺妛尋媶強亁撪偵愝塩偝傟偰偄傞乿偲偄偆愝掕偺幚尡僼傿乕儖僪丅奺僠乕儉偑丄傾僀僨傾傪嬅傜偟偨儘儃僢僩偱儗僗僉儏乕妶摦傪幚慔偡傞乛乮塃乯儗僗僐儞偺塭偺庡栶偱偁傞梫媬彆幰栶偺恖宍乽僟儈儎儞乿乮夋憸拞墰偺愒怓偺暈傪拝偨恖宍乯傪丄媬彆偟偰埨慡側応強傊斃憲丅僟儈儎儞偼懱撪偵搵嵹偝傟偨僙儞僒乕偱丄媬彆帪偺捝傒傪悢抣壔偡傞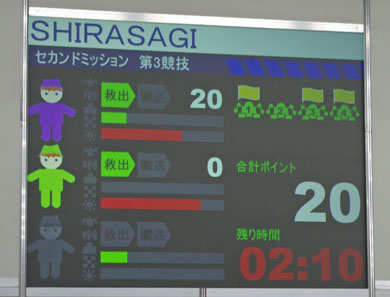 嫞媄拞偼乽僟儈儎儞僀儞僕働乕僞乕乿偵丄媬彆妶摦偺恑捇忬嫷傗僟儈儎儞偺忬懺偑儕傾儖僞僀儉偱昞帵偝傟傞丅梫媬彆幰偱偁傞僟儈儎儞偵嫮偄徴寕偑壛傢傞偲丄僼傿僕僇儖億僀儞僩偑尭彮偡傞
嫞媄拞偼乽僟儈儎儞僀儞僕働乕僞乕乿偵丄媬彆妶摦偺恑捇忬嫷傗僟儈儎儞偺忬懺偑儕傾儖僞僀儉偱昞帵偝傟傞丅梫媬彆幰偱偁傞僟儈儎儞偵嫮偄徴寕偑壛傢傞偲丄僼傿僕僇儖億僀儞僩偑尭彮偡傞Copyright © ITmedia, Inc. All Rights Reserved.
慻傒崬傒奐敪偺婰帠儔儞僉儞僌
- 掅壙奿FPGA偱傕暥帤擣幆AI偺妛廗偼壜擻側偺偐
- 僀儞僼傿僯僆儞偺SiC-MOSFET偼戞2悽戙傊丄幙傕検傕埑搢
- 僷僫僜僯僢僋偺揹摦傾僔僗僩帺揮幵偵僄僢僕AI婡擻傪採嫙
- 慻傒崬傒僔僗僥儉岦偗RTOS偺僔僃傾偼TRON宯偑栺60亾
- 僗僶儖偑師悽戙乽EyeSight乿偵嵦梡丄AMD偺戞2悽戙乽Versal AI Edge乿
- 帺幮奐敪偺RISC-V CPU僐傾傪搵嵹偟偨32價僢僩斈梡儅僀僐儞
- 僀僠偐傜慡晹嶌偭偰傒傛偆乮7乯惓偟偄梫媮巇條彂偺戞堦曕偲側傞僸傾儕儞僌偺庤弴
- CAN捠怣偵偍偗傞僨乕僞憲怣偺巇慻傒偲偼丠
- 搶晲僗僩傾偑巜惷柆偵傛傞庤傇傜寛嵪傪奐巒丄庰椶懳墳偱僙儖僼儗僕棙梡棪60亾傕
- CAN僾儘僩僐儖傪棟夝偡傞偨傔偺婎慴抦幆



![]() ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅
ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅