「これがニッポンの災害対応ロボットだ」――日立、東芝、三菱重などが研究成果を一斉公開:研究開発/ロボット技術
災害対応ロボット技術の開発に取り組んできた新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」が2012年度で完了する。これを受け、参画企業・教育機関が開発した9分野のロボット技術を一斉公開した。

東京電力・福島第一原子力発電所の事故以降、人になり代わり、現場状況の把握や復旧活動を行う災害対応ロボットの活躍が期待されている。
これまで、原子炉建屋内の過酷な状況下において、幾つかの国産ロボットが試験的に投入されてきたが、汎用性・機動性・耐久性などの課題があることが判明。国産ロボットの早急な技術水準の向上、災害対応技術の強化が求められてきた(関連記事1、関連記事2、関連記事3)。
これを受けて、新エネルギー・産業技術総合開発機構(NEDO)は2011年度から「災害対応無人化システム研究開発プロジェクト」に着手し、人間が入り込めないような過酷な災害現場で災害状況の把握や機材の運搬、復旧活動を行うためのロボット技術の開発に取り組んできた。
2013年2月20日、本プロジェクトに参画した移動ロボット研究所、日立製作所、東芝、三菱重工業、千葉工業大学、CYBERDYNEは、2012年度でプロジェクトが完了することを受け、これまで研究開発したロボット関連技術の成果を千葉工業大学 芝園キャンパス内の共同研究施設で公開した。
 公開されたロボット技術
公開されたロボット技術研究対象項目は、「作業移動機構」「計測・作業要素技術」「災害対策用作業アシストロボット」の3つである。
作業移動機構については、移動ロボット研究所が「小型高踏破性遠隔移動装置」を、日立製作所が「通信技術」を、東芝が「遠隔操作ヒューマンインタフェース」および「重量物ハンドリング遠隔操作荷揚台車」を、三菱重工業が「狭隘(あい)部遠隔重量物荷揚/作業台車の開発」を開発。計測・作業要素技術については、日立製作所が「ガンマカメラ」を、千葉工業大学が「汚染状況災害対策用作業マッピング技術」を、東芝が「水陸両用移動装置」を開発した。そして、アシストロボットについては、CYBERDYNEが「災害対策用作業アシストロボット」を開発した(詳細記事はこちら)。
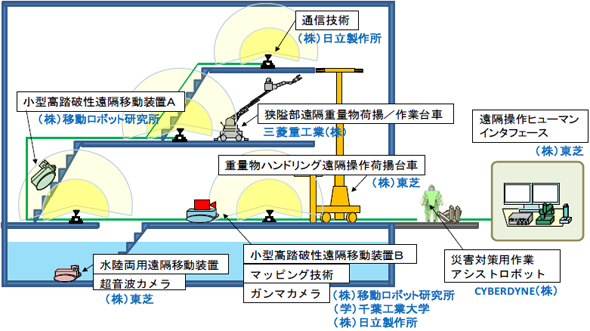 実用イメージ。小型高踏破性遠隔移動装置、狭隘部遠隔重量物荷揚/作業台車、重量物ハンドリング遠隔操作荷揚台車、災害対策用作業アシストロボットといった各技術が、共通の通信技術、ヒューマンインタフェースなどにより連携し、先行調査、機材の搬入・設置、工事、有人作業を行う
実用イメージ。小型高踏破性遠隔移動装置、狭隘部遠隔重量物荷揚/作業台車、重量物ハンドリング遠隔操作荷揚台車、災害対策用作業アシストロボットといった各技術が、共通の通信技術、ヒューマンインタフェースなどにより連携し、先行調査、機材の搬入・設置、工事、有人作業を行う本プロジェクト終了後は、参画企業や教育機関などが災害現場での実用性を高めるための課題に取り組む予定だとしている。また、NEDOは、本プロジェクトの成果が災害現場に実際に投入され、課題の解決に生かされるよう、経済産業省をはじめとする関係機関、企業などと協力していく方針だという。
ロボット/ロボット開発 コーナー

関連記事
 オールジャパンで挑む災害対策ロボット開発、実用化への道は?
オールジャパンで挑む災害対策ロボット開発、実用化への道は?
東日本大震災および東京電力・福島第一原子力発電所の事故発生当初、われわれに突き付けられたのは「日本の災害対策ロボットは実用レベルに達していない」という現実だった。あれから2年――。新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」の下、開発を進めてきた最新鋭の国産災害対策ロボット技術がプロジェクト完了を受けて一斉公開された。技術・運用面での課題はクリアできているのか? そして、実用への道は開けるのか? 三位一体で災害現場マップを素早く作成、日立の原発ロボ
三位一体で災害現場マップを素早く作成、日立の原発ロボ
日立製作所は、ネットワークロボット技術を活用した「調査モニタリングシステム」を開発した。VHF帯の無線通信で3台のモニタリングロボットを遠隔操作し、カメラ映像や各種センサーで得た情報を基に災害現場の状態マップを迅速に作成する。 2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」
2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」
三菱重工業は、人が近づけないような災害・事故現場を自由に移動し、2本のロボットアームで点検/保守・補修などが行える遠隔作業ロボット「MHI−MEISTeR(マイスター)」を開発した。 「この足は飾りじゃない!?」――従来タイプよりも優れた原発向け「4足歩行ロボット」を東芝が開発
「この足は飾りじゃない!?」――従来タイプよりも優れた原発向け「4足歩行ロボット」を東芝が開発
東芝は、東京電力・福島第一原子力発電所の原子炉建屋内の調査・復旧作業を実施する「4足歩行ロボット」と、同ロボットと有線接続可能な「小型走行車」を開発した。 福島原発での活躍に期待、先行探査型ロボット「Sakura」と「災害対策用ロボットスーツHAL」
福島原発での活躍に期待、先行探査型ロボット「Sakura」と「災害対策用ロボットスーツHAL」
千葉工業大学および移動ロボット研究所からなるグループと、CYBERDYNEは、新エネルギー・産業技術総合開発機構(NEDO)が実施している「災害対応無人化システム研究開発プロジェクト」において、それぞれコンセプトの異なる災害対応ロボットを新たに開発した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- 低価格FPGAでも文字認識AIの学習は可能なのか
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- インテルがNVIDIA対抗のAIアクセラレータ「Gaudi 3」を発表、「Xeon 6」も投入
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- 過酷な資源ごみのビン色選別を自動化、PFUがイメージスキャナー技術から新規事業
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CAN通信におけるデータ送信の仕組みとは?
- CANプロトコルを理解するための基礎知識



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。