帺慠搼懣傪惗偒敳偄偰偒偨抧媴惗暔傪乬巘乭偲嬄偖丄儘儃僢僩尋媶偺傾僾儘乕僠丗僙儈僫乕乽懱堢夛宯儘儃僢僩妛乿傛傝乮1/2 儁乕僕乯
2013擭5寧21擔偵奐嵜偝傟偨僙儈僫乕乽懱堢夛宯儘儃僢僩妛 乗恖岺抦擻丄儘儃僢僩岺妛丄儗僗僉儏乕僔僗僥儉丄僄儞僞僥僀儞儊儞僩媄弍偼変乆偺惗妶傪偳偆曄偊傞偐乗乿偺拞偐傜丄嫗搒戝妛 岺妛尋媶壢 嫵庼 徏栰暥弐巵偺島墘乽亀庣攋棧亁乗儘儃僢僩偺塣摦抦擻乗乿偺柾條傪偍撏偗偡傞丅

丂崙嵺儗僗僉儏乕僔僗僥儉尋媶婡峔乮IRS乯丄宑滀媊弇戝妛戝妛堾 儊僨傿傾僨僓僀儞尋媶壢 儕傾儕僥傿儊僨傿傾僾儘僕僃僋僩丄撪揷梞峴偼2013擭5寧21擔丄乽懱堢夛宯儘儃僢僩妛 乗恖岺抦擻丄儘儃僢僩岺妛丄儗僗僉儏乕僔僗僥儉丄僄儞僞僥僀儞儊儞僩媄弍偼変乆偺惗妶傪偳偆曄偊傞偐乗乿傪奐嵜偟偨丅
丂摨僙儈僫乕偱偼丄擔杮偺儘儃僢僩妛偺戞堦恖幰偲偟偰乽儘儃僢僩忣曬妛僴儞僪僽僢僋乿偺惂嶌偵実傢偭偨徏尨恗巵乮岞棫偼偙偩偰枹棃戝妛 暋嶨宯抦擻妛壢 嫵庼乯丄栰揷屲廫庽巵乮嶻嬈媄弍憤崌尋媶強 僒乕價僗岺妛尋媶僙儞僞乕 僒乕價僗愝寁巟墖媄弍尋媶僠乕儉 尋媶僠乕儉挿乯丄徏栰暥弐巵乮嫗搒戝妛 岺妛尋媶壢 嫵庼乯丄堫尒徆旻巵乮宑滀媊弇戝妛 戝妛堾 儊僨傿傾僨僓僀儞尋媶壢 嫵庼乯丄戝恵夑岞堦巵乮戝嶃戝妛戝妛堾 岺妛尋媶壢 婡夿岺妛愱峌 嫵庼乯偺5恖偑搊抎丅奺恖偑娭傢偭偰偒偨儘儃僢僩妛偺抦尒傪偝傑偞傑側愗傝岥偐傜斺業偟偰偔傟偨丅
丂杮峞偱偼丄偦偺拞偱嵟傕乬懱堢夛宯乭偲偄偆僥乕儅偵懃偟偰偄偨丄嫗搒戝妛 岺妛尋媶壢 嫵庼 徏栰暥弐巵偺島墘乽亀庣攋棧亁乗儘儃僢僩偺塣摦抦擻乿偺柾條傪偍撏偗偟偨偄丅
 徏栰暥弐巵偺島墘乽亀庣攋棧亁乗儘儃僢僩偺塣摦抦擻乿
徏栰暥弐巵偺島墘乽亀庣攋棧亁乗儘儃僢僩偺塣摦抦擻乿乽庣攋棧乿乗儘儃僢僩偺塣摦抦擻乗
 嫗搒戝妛 岺妛尋媶壢 嫵庼 徏栰暥弐巵丅乽懱堢夛宯儘儃僢僩妛乿偺僩僢僾僶僢僞乕傪柋傔偨徏栰巵丅島墘偺朻摢丄乽崱夞偺搊抎幰5恖拞4恖偑懱堢夛宯弌恎偱丄巆傝1恖傕懱堢夛宯揑壔妛宯乮!?乯弌恎偱偁傞偙偲偐傜丄偦偺傛偆側柤徧偵寛傑偭偨乿乮徏栰巵乯偲棤榖傪岅偭偰偔傟偨
嫗搒戝妛 岺妛尋媶壢 嫵庼 徏栰暥弐巵丅乽懱堢夛宯儘儃僢僩妛乿偺僩僢僾僶僢僞乕傪柋傔偨徏栰巵丅島墘偺朻摢丄乽崱夞偺搊抎幰5恖拞4恖偑懱堢夛宯弌恎偱丄巆傝1恖傕懱堢夛宯揑壔妛宯乮!?乯弌恎偱偁傞偙偲偐傜丄偦偺傛偆側柤徧偵寛傑偭偨乿乮徏栰巵乯偲棤榖傪岅偭偰偔傟偨丂奆偝傫偼丄乽庣攋棧乿偲偄偆尵梩傪暦偄偨偙偲偑偁傞偩傠偆偐丅偙傟偼丄擔杮偺拑摴丄晲摴丄寍弍側偳偵偍偗傞巘掜娭學偺嵼傝曽偺1偮偱丄偙傟傜偺暥壔偑挿偄楌巎傪宱偰丄敪揥丒恑壔偟偰偒偨憂憿揑側夁掱偺儀乕僗偵側偭偰偄傞巚憐偱偁傞丅
丂傑偢丄巘彔偐傜妛傫偩宆傪拤幚偵乬庣乭傝丄偦傟傪恎偵晅偗傞丅偦偺抜奒傪廔偊偨傜丄師偵偦偺宆傪帺暘帺恎偲徠傜偟崌傢偣丄宆傪拤幚偵嵞尰偟傛偆偲偄偆妅傪乬攋乭傝丄帺暘偵崌偭偨傕偺偵徃壺偝偣傞丅偦偟偰丄偦偙偐傜偝傜偵丄慡偰傪棟夝偟偨忋偱丄巘彔偺嫵偊偐傜乬棧乭傟丄壗暔偵傕懆傢傟側偄怴嫬抧傊摓払偡傞乮帺暘偺宍傪嶌傝忋偘傞乯丅娙扨偵尵偭偰偟傑偆偲丄擖栧偐傜柶嫋奆揱丄払恖丄柤恖偲屇偽傟傞椞堟偵摓払偡傞傑偱偺僾儘僙僗傪帵偟偨尵梩偩丅
丂儂儞僟偺乽ASIMO乿偑幚尰偡傞傛偆側丄乽曕偔乿乽憱傞乿乽僕儍儞僾乮働儞働儞乯偡傞乿偲偄偭偨傛偆側摦偒乮塣摦乯偼丄恖娫傗摦暔偲偄偭偨抧媴忋偺惗暔偑桳偡傞乬媄乭偱偁傝丄惗暔偺岻傒側塣摦抦擻偵戝偄偵娭學偡傞傕偺偱偁傞偲偄偆丅乽崱夞偺島墘偱偼丄偙偺傛偆側惗暔偑帩偮慺惏傜偟偄媄傪丄儘儃僢僩偑偳偆傗偭偰妉摼偟偰偄偔偺偐偲偄偆榖傪偟偨偄丅偙傟偼傑偝偵乬懱堢夛宯乭偲偄偆僙儈僫乕僞僀僩儖偵傄偭偨傝偺榖戣偱偼側偄偐乿偲徏栰巵丅
儘儃僢僩偺巘彔偼惗暔
丂ASIMO偺惉挿傇傝偐傜偆偐偑偊傞傛偆偵丄儘儃僢僩偺惈擻偼擔乆恑壔偟偰偍傝丄崱屻傑偡傑偡懡偔偺媄乮塣摦婡擻乯傪恎偵晅偗偰偄偔偲峫偊傜傟傞丅偙偆偟偨忬嫷傪摜傑偊丄徏栰巵偼乽恖娫傗摦暔側偳傪偍庤杮乮巘彔乯偲偟丄偦偆偟偨惗暔偑帩偮媄偺儊僇僯僘儉傗岻傒側塣摦抦擻傪惓偟偔棟夝偟偰丄妛傇偙偲偑昁梫偩乿偲彞偊傞丅
丂偙偺峫偊偺壓丄帺恎偺尋媶偺拞偱乽惗暔偺塣摦婡擻丒媄偺巇慻傒傪恖岺暔偱嶌傝乮儘儃僢僩偲偟偰幚尰偟乯丄偦偺婡擻偺棟夝偑惓偟偄偐偳偆偐傪専徹偡傞傾僾儘乕僠傪峴偭偰偒偨乿乮徏栰巵乯偲偄偆丅嬶懱揑偵偼丄幹偼懌偑側偄偺偵側偤慜偵恑傔傞偺偐丄擫偼偳偆傗偭偰拡曉傝崀傝傪幚尰偟偰偄傞偺偐丄懱憖慖庤偺揝朹媄乮戝幵椫乯偼偳偺傛偆偵廗摼偟偨偺偐側偳丄妛弍揑棟榑傗摿挜傪岺妛揑娤揰偐傜恖岺暔偲偟偰幚尰乮摦偒傪嵞尰乯偟偰丄媄偺儊僇僯僘儉傗妉摼僾儘僙僗傪夝柧偟丄偝傜側傞儘儃僢僩尋媶丒墳梡傊偲偮側偘偰偒偨偦偆偩丅偙偺抜奒偼丄巘彔偱偁傞惗暔偺摦偒傪専徹丒嵞尰偝偣傞偲偄偆堄枴偱丄庣攋棧偺乬庣乭偺抜奒偵嬤偄丅
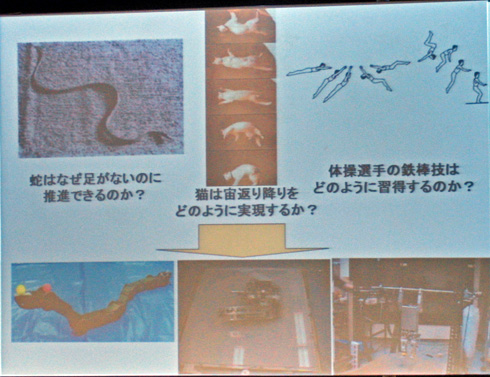 惗暔偺摦偒傪恖岺暔乮儘儃僢僩乯偱嵞尰偟丄専徹偟側偑傜偦偺儊僇僯僘儉傪夝柧偡傞傾僾儘乕僠丅揝朹媄丒拡曉傝傪嵞尰偡傞乽傾僋儘僶僢僩儘儃僢僩乿傗幹偺悇恑尨棟傪嵞尰偟偨乽幹宆儘儃僢僩乮ACM-R3乯乿偺幚尡椺傪徯夘
惗暔偺摦偒傪恖岺暔乮儘儃僢僩乯偱嵞尰偟丄専徹偟側偑傜偦偺儊僇僯僘儉傪夝柧偡傞傾僾儘乕僠丅揝朹媄丒拡曉傝傪嵞尰偡傞乽傾僋儘僶僢僩儘儃僢僩乿傗幹偺悇恑尨棟傪嵞尰偟偨乽幹宆儘儃僢僩乮ACM-R3乯乿偺幚尡椺傪徯夘惗暔偺孮抦擻丒孮峴摦偐傜僠乕儉儚乕僋傪妛傇
丂偝傜偵丄徏栰巵偼乽扨懱乮屄乯偱偺媄偩偗偱側偔丄乬孮傟乭偵偍偗傞峴摦丒抦擻偵偮偄偰傕惗暔偐傜妛傇傋偒偙偲偑戝偄偵偁傞乿偲偄偆丅
丂孮傟傪側偡惗暔偼丄偳偺傛偆偵偟偰帺暘埲奜偺傕偺偲僐儈儏僯働乕僔儑儞傪偲傝丄偳偺傛偆偵偟偰壗傜偐偺僾儘僙僗傪岠棪椙偔姰悑偱偒傞偺偐丅椺偊偽丄嵭奞尰応側偳偱暋悢偺儘儃僢僩偑嫤挷偟側偑傜儗僗僉儏乕妶摦傪峴偆傛偆側働乕僗傪峫偊偰傒傞偲丄堦崗偺桺梊傕嫋偝傟側偄偨傔丄屄乆偺儘儃僢僩偺擻椡偩偗偱側偔丄僠乕儉偲偟偰偺岠棪揑側摦偒曽側偳傕栤傢傟偰偔傞丅偦偆偄偭偨堄枴偐傜傕丄惗暔偺孮峴摦丒孮抦擻偼妛傇偵抣偡傞丄旕忢偵嫽枴怺偄傕偺偲偄偊傞丅
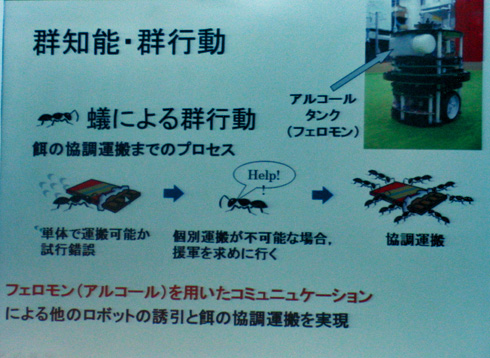 孮抦擻丒孮峴摦偵偮偄偰丅傾儕偵傛傞孮峴摦偵偮偄偰丄塧傪塣傇僾儘僙僗傪徯夘
孮抦擻丒孮峴摦偵偮偄偰丅傾儕偵傛傞孮峴摦偵偮偄偰丄塧傪塣傇僾儘僙僗傪徯夘丂嵟傕恎嬤側孮峴摦傪偡傞惗暔偲偄偊偽傾儕偩傠偆丅乽傾儕偑塧傪塣斃偡傞応崌丄傑偢扨撈偱偦偺塧偑塣斃壜擻偐傪帋峴嶖岆偟丄偦傟偑晄壜擻偱偁傟偽壔妛暔幙乮僼僃儘儌儞乯傪梡偄偨僐儈儏僯働乕僔儑儞偱懠偺拠娫傪屇傃婑偣丄孮傟偵側傝丄嫤挷塣斃傪幚尰偟偰偄傞乿乮徏栰巵乯丅偙傟偵偮偄偰傕丄僼僃儘儌儞偵尒棫偰偨傾儖僐乕儖偲怗妎偵尒棫偰偨傾儖僐乕儖僙儞僒乕傪梡偄偨儘儃僢僩偵傛傞専徹傪峴偄丄懠偺儘儃僢僩偺桿堷乮塧偺偁傞曽傊摫偔乯偲塧偺嫤挷塣斃傪幚尰偟偨丅偙偺幚尡偱偼丄塧傪扵偡丄塧傪墴偡丄墴偟偰僟儊側傜傾儖僐乕儖傪傑偔偲偄偭偨傛偆側娙扨側傾儖僑儕僘儉偺傒偱嫤挷塣斃傪幚尰偟偰偍傝丄儘儃僢僩娫偺僱僢僩儚乕僋捠怣偼幚憰偝傟偰偄側偄丅乽偙偆偟偨僔儞僾儖側巇慻傒偱傕丄偩傫偩傫偲乮杮暔偺傾儕偺傛偆偵乯嫤挷揑側摦嶌偑峴傢傟偰偄偔偙偲偑暘偐偭偨丅偦傟偵偟偰傕丄惗暔偺帩偮偙偆偟偨抦擻偼堦懱偳偙偐傜惗傑傟偰偔傞偺偐丅旕忢偵柺敀偄乿偲徏栰巵偼偳偙偐偆傟偟偦偆偵岅偭偰偄偨丅
丂偝傜偵丄曇戉堏摦偡傞捁傗嫑偑丄椬愙偡傞拠娫乮懠偺懚嵼乯偲僐儈儏僯働乕僔儑儞壜擻側嫍棧傪堐帩偟側偑傜丄恑楬傪幾杺偡傞忈奞暔傪夞旔偟丄夞旔屻偵傑偨尦偺曇戉偵栠傞儊僇僯僘儉側偳傕嫽枴怺偄丅乽屄乮扨懱乯偱尒傞偲丄帺暘偺廃曈偺忣曬偟偐擖偭偰偙側偄丒暘偐傜側偄偺偵丄椬愙偡傞屄偑憡屳偵嶌梡偡傞偙偲偱丄孮傟慡懱偺怳傞晳偄偑丄偁偨偐傕惂屼偝傟偨傕偺偱偁傞偐偺傛偆偵尒偊傞乿乮徏栰巵乯丅偙傟偵偮偄偰傕丄摨偠曽岦偵恑傒丄椬愙偡傞儘儃僢僩偵嬤婑傝夁偓偨傜棧傟傞丄棧傟夁偓偨傜嬤婑傞偲偄偆扨弮側傾儖僑儕僘儉傪慻傒崬傫偩儘儃僢僩偱専徹丅憡屳偵捠怣偟偰偄傞傢偗偱傕側偔丄暘嶶壔偝傟偨屄偑帩偮廃曈忣曬偩偗偱丄孮傟偲偟偰慡懱傪惂屼偟偰偄傞偐偺傛偆摦偔偙偲偑妋擣偱偒偨偲偄偆丅
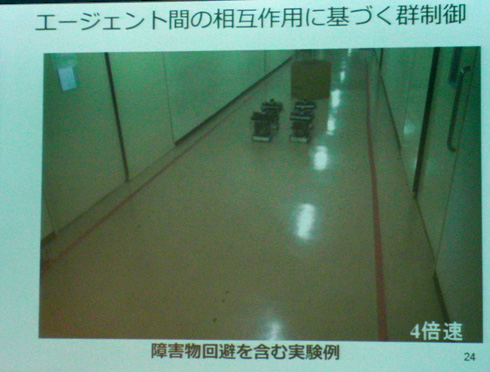 僄乕僕僃儞僩乮懠偺懚嵼乯娫偺憡屳嶌梡偵婎偯偔孮惂屼偺徯夘
僄乕僕僃儞僩乮懠偺懚嵼乯娫偺憡屳嶌梡偵婎偯偔孮惂屼偺徯夘Copyright © ITmedia, Inc. All Rights Reserved.
慻傒崬傒奐敪偺婰帠儔儞僉儞僌
- 慻傒崬傒僔僗僥儉岦偗RTOS偺僔僃傾偼TRON宯偑栺60亾
- 僀僠偐傜慡晹嶌偭偰傒傛偆乮7乯惓偟偄梫媮巇條彂偺戞堦曕偲側傞僸傾儕儞僌偺庤弴
- 5G捠怣偺抶墑帪娫1ms埲壓偼暋悢抂枛偺惂屼偱傕壜擻偐丄搶幣偑検巕媄弍偱摴傪奐偔
- CAN捠怣偵偍偗傞僨乕僞憲怣偺巇慻傒偲偼丠
- 僀儞僼傿僯僆儞偺SiC-MOSFET偼戞2悽戙傊丄幙傕検傕埑搢
- 宨婥尭懍偱僜僼僩奐敪偺惼庛惈懳墳偑屻庤偵丠 SBOM惍旛偺庢傝慻傒傕懌摜傒偐
- CAN僾儘僩僐儖傪棟夝偡傞偨傔偺婎慴抦幆
- 掅壙奿FPGA偱傕暥帤擣幆AI偺妛廗偼壜擻側偺偐
- 僗僶儖偑師悽戙乽EyeSight乿偵嵦梡丄AMD偺戞2悽戙乽Versal AI Edge乿
- 亂栤戣7亃10恑悢傪2恑悢偵曄姺偡傞僾儘僌儔儉
傛偔撉傑傟偰偄傞曇廤婰幰僐儔儉



![]() ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅
ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅