帺慠搼懣傪惗偒敳偄偰偒偨抧媴惗暔傪乬巘乭偲嬄偖丄儘儃僢僩尋媶偺傾僾儘乕僠丗僙儈僫乕乽懱堢夛宯儘儃僢僩妛乿傛傝乮2/2 儁乕僕乯
乬柍乭偐傜妛廗偟丄惉挿偡傞儘儃僢僩
丂懕偄偰丄徏栰巵偼乽惂屼乿偲乽妛廗乿偺堘偄偵偮偄偰怗傟丄乬儘儃僢僩偺抦擻乭偵偮偄偰徯夘偟偨丅
丂惗傑傟偨偽偐傝偺恖娫偼丄嵟弶壗傕偱偒側偄偑丄惉挿丒妛廗偡傞偵偮傟偰丄僴僀僴僀偑偱偒丄偮偐傑傝棫偪偑偱偒丄儓僠儓僠曕偒偑偱偒丄擇懌曕峴偑偱偒丄憱傞偙偲偑偱偒傞傛偆偵側偭偰偄偔丅乽惂屼偲偄偆偲恖娫偑儘儃僢僩偵摦偒曽傪偁傜偐偠傔嫵偊崬傓乮僾儘僌儔儉偡傞乯偙偲偵側傞丅偙傟偵懳偟丄妛廗偼恖娫偺傛偆偵丄儘儃僢僩偑壗傕暘偐傜側偄忬懺偐傜妛傫偱丒惉挿偟偰偄偔偲偄偆偙偲偩丅偨偩偟丄妛廗偺応崌偼丄乬惉岟乭偵懳偟偰曬廣傪梌偊傞丒朖傔傞偙偲偱丄偦傟偑惓偟偄傕偺偱偁傞偲丄恖娫偑嫵偊偰偁偘傞昁梫偑偁傞乮偦偺媡傕乯乿偲偄偆丅
 乽嫮壔妛廗乿偵偮偄偰
乽嫮壔妛廗乿偵偮偄偰丂帋峴偟偰乮偁傞忬懺偱揔摉側峴摦傪婲偙偟偰乯丄偦傟偑惉岟偱偁傟偽朖傔傜傟傞丅偦偆側傞偲丄偳傫偳傫楙廗傪孞傝曉偟偰丄惉斲傪妛傃丄惉岟偡傞偨傔偺峴摦偑嫮壔偝傟偰偄偔丅偙傟傪乽嫮壔妛廗乿偲偄偆偦偆偩丅乽椺偊偽丄懌偺忋偘壓偘偟偐棟夝偟偰偄側偄乮恀偭偡偖曕偔偙偲傪抦傜側偄乯懡懌儘儃僢僩偑丄嫮壔妛廗傪壗搙傕孞傝曉偟偰偄偔偲丄嵟廔揑偵乬嵟揔側曕峴乭傪妉摼偱偒傞傛偆偵側傞乿乮徏栰巵乯丅偙偺懡懌儘儃僢僩帠椺偼丄僔儈儏儗乕僞忋偱偺専徹偩偑丄幚嵺偵丄傾僋儘僶僢僩儘儃僢僩偵揝朹偺廟忋偑傝偺楙廗傪壗搙傕偝偣偨寢壥丄嵟廔揑偵丄1夞慜偵怳傝弌偟偰斀摦傪晅偗偰偐傜丄偦偺惃偄傪巊偭偰2夞栚偱廟忋偑傝傪惉岟偝偣傞偲偄偆僾儘僙僗傪乬儘儃僢僩側傝偵乭妋棫偱偒偨偲偄偆丅
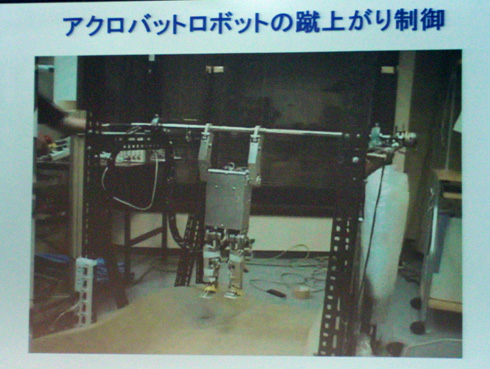 乽傾僋儘僶僢僩儘儃僢僩乿偵傛傞廟忋偑傝惂屼
乽傾僋儘僶僢僩儘儃僢僩乿偵傛傞廟忋偑傝惂屼丂側偤丄懱憖慖庤偺傛偆偵1夞偱廟忋偑傝偱偒側偄偺偐丅偙傟偑壗傪堄枴偟偰偄傞偺偐乧乧丅偦傟偼偮傑傝丄嫮壔妛廗傪捠偠丄儘儃僢僩偑帩偮偦傕偦傕偺擻椡傗娐嫬側偳偐傜丄乬帺暘偵崌偭偨傗傝曽傪帺傜偑摫偒弌偟偨乭偲偄偆偙偲偩丅乽偙偺寢壥偼丄巹傕梊憐偱偒側偐偭偨丅偙傟偑丄庣攋棧偺乬攋乭偵憡摉偡傞抜奒偐傕偟傟側偄丅宆傪庣傞偩偗偱偼僟儊偱丄乬帺暘偺恎懱偵偁偭偨摦偐偟曽乭傪恎偵晅偗丄妉摼偟偰偄偐側偗傟偽側傜側偄丅愭傎偳偺儘儃僢僩偑2夞栚偱廟忋偑傝偟偰偄偨偺偼丄嫮壔妛廗偵傛傝摼偨丄偦偺儘儃僢僩偵偲偭偰偺嵟慞偺傗傝曽側偺偩乿乮徏栰巵乯丅
 乽恎懱惈乿偵偮偄偰丅惗暔偼塣摦偑婎偵側偭偰偄傠偄傠側抦擻傪庤偵偟偰偒偨偲偟丄乽抦擻偼擼偱偼側偔丄恎懱偵廻傞乿偲嫮挷偡傞徏栰巵
乽恎懱惈乿偵偮偄偰丅惗暔偼塣摦偑婎偵側偭偰偄傠偄傠側抦擻傪庤偵偟偰偒偨偲偟丄乽抦擻偼擼偱偼側偔丄恎懱偵廻傞乿偲嫮挷偡傞徏栰巵丂乽傢傟傢傟惗暔偼丄偦偺恎懱偵崌偭偨塣摦抦擻傪偳傫偳傫偲妉摼偟偰偄偭偰偄傞偼偢丅偩偐傜丄抦擻偼擼偱偼側偔丄恎懱偵廻傞丅巹偼丄塣摦偑慡偰偺抦擻傪惗傒弌偟偨崻尮偩偲峫偊偰偄傞丅椺偊偽丄崢傪棊偲偟偰丄廳偄傕偺傪帩偪忋偘傞嵺丄亀偆偭!!亁偲惡傪敪偟偰椡傪擖傟傞偙偲偑偁傞丅偙傟偑幚偼壒惡偑惗傑傟偨偒偭偐偗偵側偭偨偺偱偼側偄偐偲巚偆丅塣摦偑婎偵側傝丄惡偑惗傑傟偰偒偰丄偦傟偑僐儈儏僯働乕僔儑儞偲偄偆抦揑側僣乕儖偵恑壔偟偰偄偭偨偺偱偼側偄偩傠偆偐乿乮徏栰巵乯丅
惗暔傪挻偊傞儘儃僢僩偵岦偗偰
丂偝偰丄巆傞乬棧乭偺抜奒偩偑丄尰忬偱偦偺嫬抧偵棫偮儘儃僢僩偼嫲傜偔懚嵼偟側偄偩傠偆丅乬棧乭偺嫬抧偵払偡傞偲偄偆偙偲偼丄惗暔偺擻椡傪姰慡偵挻偊偨偙偲傪堄枴偡傞偐傜偩丅
丂徏栰巵偼乽恖娫傪偼偠傔偲偡傞抧媴忋偵偄傞慡偰偺惗暔偼丄杮摉偵慺惏傜偟偔丄愻楙偝傟偨媄乮摦偒乯傪夛摼偟偰偄傞丅偦傟偼抧媴抋惗埲棃丄挿偄楌巎偺拞偱帺慠搼懣傪孞傝曉偟側偑傜丄惗偒巆偭偰偒偨傕偺偩偐傜偩丅偩偐傜偙偦丄偦偆偟偨惗暔偐傜媄傪妛傃丄僸儞僩傪摼偰丄儘儃僢僩偵墳梡偟偰偄偔偙偲偵戝偒側堄枴偑偁傞丅偦偟偰丄偙偆偟偨傾僾儘乕僠傪孞傝曉偟峴偭偰偄偔偙偲偱丄彨棃丄惗暔傪挻偊傞儘儃僢僩傪惗傒弌偟偰傒偨偄乿偲岅傞丅


儘儃僢僩奐敪偺嵟慜慄

娭楢婰帠
- 楢嵹婰帠乽師悽戙儘儃僢僩奣榑乿
 儘儃僢僩偲曢傜偡惗妶偼丄幚尰壜擻側乬柌偺榖乭
儘儃僢僩偲曢傜偡惗妶偼丄幚尰壜擻側乬柌偺榖乭
恎嬤側惗妶嬻娫偵僒乕價僗儘儃僢僩偑傗偭偰偒偨傜乗乗丅僉僢僠儞傗儕價儞僌偱丄儘儃僢僩偼偳偺傛偆側僒乕價僗傪採嫙偟偰偔傟傞偺偩傠偆偐丅儘儃僇僢僾仐HOME儕乕僌偺柾條傪捠偠丄僒乕價僗儘儃僢僩奐敪偺擄偟偝傪抦偭偨丅 崙嵺埨慡婯奿偐傜尒傞僒乕價僗儘儃僢僩嶻嬈
崙嵺埨慡婯奿偐傜尒傞僒乕價僗儘儃僢僩嶻嬈
慻傒崬傒僔僗僥儉丒僜僼僩僂僃傾偵娭偡傞奺庬曌嫮夛傗忣曬岎姺夛丄僙儈僫乕側偳傪捠偠偰丄嫵堢偲尋媶丒媄弍奐敪偺椉柺偵偍偄偰峀斖埻側嶻妛楢実妶摦偺応傪採嫙偡傞乽慻崬傒僔僗僥儉尋媶夛乿偼丄怴妰丒挿壀媄弍壢妛戝妛偱慻傒崬傒僙儈僫乕傪幚巤丅儅僀僋儘僜僼僩傗抧尦挿壀偺慻傒崬傒娭楢婇嬈丄慻傒崬傒娭楢偺嬈奅抍懱偑島墘傪峴偭偨丅
Copyright © ITmedia, Inc. All Rights Reserved.
慻傒崬傒奐敪偺婰帠儔儞僉儞僌
- 掅壙奿FPGA偱傕暥帤擣幆AI偺妛廗偼壜擻側偺偐
- 慻傒崬傒僔僗僥儉岦偗RTOS偺僔僃傾偼TRON宯偑栺60亾
- 僀僠偐傜慡晹嶌偭偰傒傛偆乮7乯惓偟偄梫媮巇條彂偺戞堦曕偲側傞僸傾儕儞僌偺庤弴
- 僷僫僜僯僢僋偺揹摦傾僔僗僩帺揮幵偵僄僢僕AI婡擻傪採嫙
- 僀儞僼傿僯僆儞偺SiC-MOSFET偼戞2悽戙傊丄幙傕検傕埑搢
- CAN捠怣偵偍偗傞僨乕僞憲怣偺巇慻傒偲偼丠
- 5G捠怣偺抶墑帪娫1ms埲壓偼暋悢抂枛偺惂屼偱傕壜擻偐丄搶幣偑検巕媄弍偱摴傪奐偔
- 僗僶儖偑師悽戙乽EyeSight乿偵嵦梡丄AMD偺戞2悽戙乽Versal AI Edge乿
- CAN僾儘僩僐儖傪棟夝偡傞偨傔偺婎慴抦幆
- 宨婥尭懍偱僜僼僩奐敪偺惼庛惈懳墳偑屻庤偵丠 SBOM惍旛偺庢傝慻傒傕懌摜傒偐
傛偔撉傑傟偰偄傞曇廤婰幰僐儔儉



![]() ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅
ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅