親子ペア快進撃――レゴ マインドストームを活用した一番すごいロボット決定戦!!:「ロボTRY」決勝イベントリポート(1/2 ページ)
「レゴ マインドストーム EV3」を活用したロボットコンテスト「ロボTRY」の決勝イベントをリポートする。お題なし、各種デバイスやWebサービスとの連携も自由。EV3さえ用いれば何でもOKというユニークなロボコンは、技術力だけでなく、柔らかな発想力が問われる!? さて、一番すごいロボットを作ったのはどのチームか?

「理系学生ものづくり日本一決定戦」と銘打つコンテスト「ロボTRY」の決勝イベントが、2013年11月24日にJR東京駅前のグラントウキョウサウスタワーにて開催された。本大会は「レゴ マインドストーム EV3(以下、EV3)」を用いたロボットコンテストで、今回が初開催となる。特にテーマは設定されておらず、EV3さえ用いればどんなデバイス、Webサービスと組み合わせてもよい。つまり、技術力だけでなく、発想力も問われる大会なのだ。
決勝イベントでは、特別ゲストとして“Rubyの女神”こと池澤あやかさんが登場。自身でEV3をプログラミングしたロボットを持参し、会場を盛り上げてくれた。
 「ロボTRY」の決勝イベントでは、特別ゲストとして“Rubyの女神”池澤あやかさんが登場!
「ロボTRY」の決勝イベントでは、特別ゲストとして“Rubyの女神”池澤あやかさんが登場!本大会は、同年9月下旬にコンテスト開催が告知され、11月12日には作品提出(ビデオなど)という超短期スケジュールだったが、何と30以上のチームがエントリー。その中から、厳しい予選審査を勝ち抜いた精鋭12チームが決勝イベントに進出したのだ。
決勝イベントでは、12チームによる各10分間のデモンストレーションを含むプレゼンテーションと質疑応答が行われた。これを3人の審査員が採点し、優秀作品・チームを決定した。
結果は以下の通りだ(表1)。
| 順位 | チーム名 | 作品名 |
|---|---|---|
| 第1位 | 一菜 | Mindeyes |
| 第2位 | ASONDEMITA | 2wayユーフォーキャッチャー |
| 第3位 | みやけん | CABA-ROBO |
| アフレル特別賞 | くろだ02 | Fisans |
| teamLab特別賞 | みやけん | CABA-ROBO |
| 表1 決勝イベントの結果。第3位のチーム「みやけん」の作品「CABA-ROBO」は、teamLab特別賞も受賞している | ||
 「ロボTRY」決勝イベントの集合写真
「ロボTRY」決勝イベントの集合写真本稿では、表1に挙げた受賞作品を中心に、テクノロジーの観点からリポートをお届けする。
「センサー」と「アクチュエーター」の活用が腕の見せどころ!
ロボットのテクノロジーといえば、「センサー」と「アクチュエーター」が重要である。WebやデータベースなどのITシステムとの決定的な違いはここであり、実世界とのインタラクションを実現する上で、入力となるセンサーと、出力となるアクチュエーターを、どのように利用し、使いこなせるかが腕の見せどころになる。
第1位(グランプリ)に輝いたチーム「一菜」は、EV3の赤外線センサーと、汎用の24GHzマイクロ波センサーを利用した、見えないものを識別するロボット「Mindeyes」を開発した。本物の果物と食品サンプルやオモチャの果物、そしてぬいぐるみを選別するベルトコンベヤーを搭載したロボットで、電波の吸収量から対象物を識別し、ベルトコンベヤーやターンテーブルによってモノを振り分ける。決勝イベントでは、紙の箱の中に隠された対象物を見事に選別してみせた。
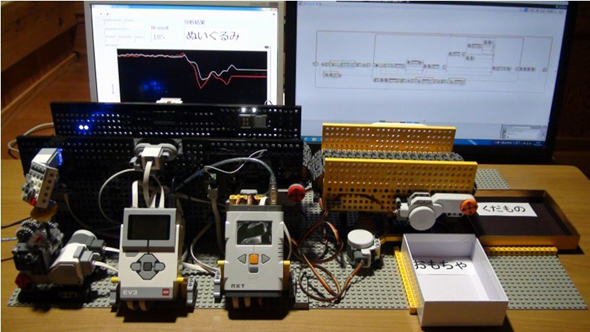 チーム「一菜」の見えないものを識別するロボット「Mindeyes」
チーム「一菜」の見えないものを識別するロボット「Mindeyes」この24GHzマイクロ波センサーはEV3ではなく、前世代機である「レゴ マインドストーム NXT(以下、NXT)」にI2C接続されるが、このNXTと、赤外線センサーを接続したEV3が、モーターを介して連携することによって機能実現している。
アクチュエーターとしては、EV3の標準モーターを利用するチームも多い中、モーター出力のI2C情報を利用し、ハイパワーのアクチュエーターを利用するチームもあった。惜しくも上位入賞を逃したチーム「えりたけんちゃん」の作品「宇宙エレベーター」や、チーム「ToolBox」の作品「大阪のオカン」がそれである。宇宙エレベーターは高出力のモーターを、大坂のオカンはパトライトを派手に回転させていた。
Twitter、Ustreamを活用したネット活用ロボ
また、ネットワーク接続を活用したロボットも多くみられた。例えば、Twitterと連動し、イベント情報をタイムラインに投稿するロボットとしては、前述の大坂のオカンの他、第3位に輝いた大学生チーム「みやけん」の作品「CABA-ROBO」があった。大坂のオカンは、対象者のヘッドフォンに組み込まれた加速度センサーによって、居眠りを検出し、ピンポン玉を対象者に投げ付け、パトライトを派手に回転させる。そして、居眠りしたことをTwitter上にさらすという仕打ち(お仕置き)をするものだ。一方のCABA-ROBOは、遠距離恋愛する恋人や奥さまからの“遠隔アーン”を実現するロボットで、ラブラブ状態をTwitterに自慢げに投稿する機能を備える。
 第3位に輝いたチーム「みやけん」の作品「CABA-ROBO」
第3位に輝いたチーム「みやけん」の作品「CABA-ROBO」第2位となったチーム「ASONDEMITA」の作品「2wayユーフォーキャッチャー」は、遠隔地からUstreamを介してUFOキャッチャーを操作できるというものだ。Ustreamの中継映像を見ながら、チャット欄にコマンドを入力することで操作できる。UstreamからIRCをAWS(Amazon Web Service)のPerlスクリプトで処理してEV3を制御している。
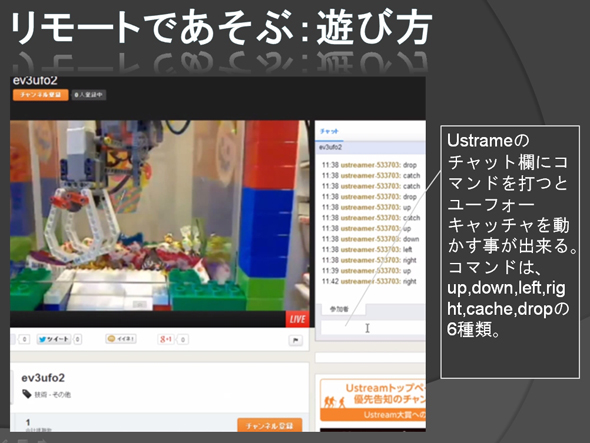 第2位となったチーム「ASONDEMITA」の作品「2wayユーフォーキャッチャー」
第2位となったチーム「ASONDEMITA」の作品「2wayユーフォーキャッチャー」Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- ソニーのLPWA「ELTRES」の通信モジュールが機能追加、システムの簡素化が可能に
- CANプロトコルを理解するための基礎知識
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- 【問題7】10進数を2進数に変換するプログラム
- テスト消化曲線とバグ発生曲線の7パターン診断
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 6Gに向けたサブテラヘルツ帯対応無線デバイス、100Gbpsの超高速伝送を実証
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。