
ソフトバンクのロボット事業、本命は「Pepper」ではなく「V-Sido OS」か!?:ロボット開発の分業化・効率化を目指す(1/4 ページ)
先日のソフトバンクの発表に続き、同グループ会社のアスラテックが「新規ロボット事業」に関する記者説明会を開催。ロボット制御ソフトウェア「V-Sido OS」を主軸とする同社の戦略・展望を、当日の発表内容とチーフロボットクリエーターである吉崎航氏のコメントを交えて紹介する。

パーソナルロボット「Pepper(ペッパー)」を引っ提げてロボット事業への本格参入を発表したばかりのソフトバンクが、早くも次の一手を打ってきた(関連記事:ソフトバンク、世界初となる“愛”を持ったパーソナルロボット「Pepper」発売へ)。
2014年6月11日、ソフトバンクの100%子会社であるアスラテックは、「新規ロボット事業」に関する記者説明会を開催(関連記事:ソフトバンクがロボット事業で二の矢を放つ、人とロボの橋渡しをする「V-Sido OS」)。ロボット制御ソフトウェア「V-Sido OS」およびV-Sido OSの一部機能を1枚の基板に実装したマイコンボード「V-Sido CONNECT」を主軸とした事業戦略について発表した。アスラテックがソフトバンクグループとして大々的にロボット事業に関する発表を行ったのはこれが初めてとなる。
 アスラテック チーフロボットクリエーター 吉崎航氏
アスラテック チーフロボットクリエーター 吉崎航氏既にご存じの方もいるかと思うが、 「V-Sido(ブシドー)」とは、当時、奈良先端科学技術大学院大学の学生だった吉崎航氏が1人で開発したロボット制御ソフトウェアである。鉄鋼アーティストの倉田光吾郎氏と共同開発した搭乗型ロボット「KURATAS(クラタス)」に採用されたことでも有名だ。現在、吉崎氏は、2013年7月に設立されたアスラテックにおいて、チーフロボットクリエーターとしてその手腕を発揮している(関連記事:搭乗型巨大ロボット「KURATAS」を安全に動かすソフトウェアのヒミツ)。
本稿では、発表会当日の模様と、別途、吉崎氏に取材した内容とを織り交ぜながら、アスラテックの事業戦略について詳しく紹介していく。
人間とロボットの橋渡しをする「V-Sido OS」
先日のPepperの登場に象徴されるように、ロボット業界が今盛り上がりをみせている。さまざまな企業や研究機関などが災害用や介護用といったロボットを世に送り出している中、吉崎氏は「『AI』『制御』『モータ』『センサー』『機構』など、ロボット開発に関わる各分野が今まさに活性化し始めている」と語る。その中で、アスラテックはロボット制御の中核となる「OS」部分にフォーカスし、V-Sido OSの普及・展開を狙おうとしている。
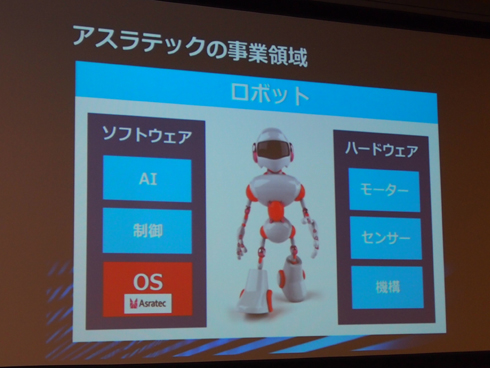 アスラテックの事業領域
アスラテックの事業領域V-Sido OSは、従来のロボットのようにあらかじめ決められた(作り込まれた)モーションで動作するのではなく、リアルタイムで関節の動きやバランスなどを計算しながらロボットの動きを自動制御できる(関連記事:ホビーロボから巨大ロボまで――ロボットの簡単制御を実現する「V-Sido CONNECT」)。吉崎氏は「V-Sido OSには、“人とロボットをつなぐOS”に必要な要素である『リアルタイム』『安定化』『効率化』の3つが備わっている」と説明。これら要素により、人の意図が伝えやすく、安全で、使いやすいロボットの開発が可能になるという。
記者説明会で披露されたムービー(動画1)では、「ロボットのOSとは、人間とロボットとの間を取り持つ役割を担うもの。難しいプログラムを必要とせずに、命令1つでOSがロボットに指示を出してくれる」と紹介。V-Sido OSは、PCやスマートフォンにおけるOSと同様に、システムの中枢を担うわけだが、単に「右腕を上げる」という命令を指示するのではなく、転倒しないよう全体のバランスをリアルタイムで計算した上で、ロボットの右腕を上げさせる。何も考慮せずに「右腕を上げる」という命令だけを実行してしまうと、腕を振り上げた途端にロボットがバランスを崩し、転倒する可能性がある。
例えば、Pepperのように家庭内や店舗などで動作する等身大パーソナルロボットを考えた場合、“転倒”はロボット自身が壊れるだけではなく、家族(人間)がケガをする危険性もある。そういう意味で、リアルタイムに倒れないよう制御をしてくれるV-Sido OSの役割は大きいといえるだろう。
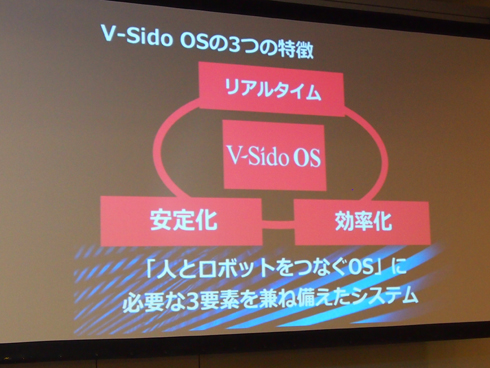 V-Sidoの3つの特徴
V-Sidoの3つの特徴「V-Sido OSは、一般的なロボットのように動きをあらかじめ作っているのではなく、人間の意図に合わせて問題のない動き、矛盾のない動きをリアルタイムに生成する。用意されたモーションで動くのではなく、人間が大まかに指示した意図を瞬時に理解して、思い通りに動かすことができる」(吉崎氏)。例えば、「歩く」という指示を出した場合、安定して歩行するのはもちろんだが、その際の上半身の動作は特に指示することなく、V-Sido OS側で勝手に効率化して動かしてくれる。
クラウドがロボットを動かす時代に
続いて、吉崎氏は「ロボットの操縦は、人間だけが行うものではない」と述べる。今後は、人間の操縦だけでなく、AI(人工知能)、クラウドAIといったものが“知能”として、ロボットに指示を出すことが考えられるという。
また、一方で実際の動作を生み出す“機械”についても、サーボモータ、油圧、空圧などさまざまなバリエーションがあるとし、「これからのロボット開発は、多種多様な知能と機械に対応していく必要がある。V-Sido OSであれば、従来のようにサーボ用、油圧用などのソフトウェアを個別に用意することなく、V-Sido OSを仲介させるだけで、全ての知能と機械をつなぎ込むことができる」と吉崎氏は説明する。


まさに、こうした“違い”を吸収してくれる点がV-Sido OSの強みであり、大きさや構造が異なるさまざまなタイプのロボットへの展開を可能とする。
| ホビーロボット | GR-001(HPI製) RIC30(アールティ製) その他オリジナルロボット |
|---|---|
| 等身大ロボット | ネコ店長(アールティ製) NEXTAGE(川田工業製) アクトロイド(ココロ製) I-FAIRY(ココロ製) |
| 大型ロボット | クラタス(水道橋重工製) パワーショベル(人型ロボット HRM2で遠隔操作) |
| 表 これまでのV-Sido OSの主な適用実績 | |
Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -


Special Contents 1
- PR -
Special Contents 2
- PR -

Special Site
- PR -
Pickup Contents
- PR -

コーナーリンク
組み込み開発の記事ランキング
- Rapidusは新工場稼働間近、クエスト・グローバルとの協業でRUMSモデルが完成へ
- ROSのAIエージェント「RAI」を使って自然言語でアームロボットを制御する
- 日本の汎用ロボット開発の起爆剤となるか、基盤モデル構築目指すAIRoAが発足
- PLCのリアルタイム性を確保するために商用リアルタイムOSとライブラリを採用
- インテルCPUの黎明期を支えたRTOS「iRMX」はなぜ過去のものになったのか
- リアルタイムOS列伝まとめ(第31回~35回)
- CAN通信におけるデータ送信の仕組みとは?
- NVIDIAのGPUは「Blackwell Ultra」から「Rubin」へ、シリコンフォトニクスも採用
- シフトレフトアプローチでSDV開発を推進するための戦略的協業を発表
- ウェアラブルエコーセンサーの共同プロジェクト、2026年の製品化を目指す
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。