
光で距離を測って安全に降下せよ! ~レーザー高度計(LIDAR)の仕組み~:次なる挑戦、「はやぶさ2」プロジェクトを追う(10)(1/3 ページ)
小惑星表面までの距離が正確に分からないと、安全にタッチダウンすることができず、激突して探査機が壊れてしまうかもしれない。今回は、「はやぶさ2」で大きく改良された「レーザー高度計(LIDAR)」について紹介しよう。
小惑星へのタッチダウンにおいて、距離を計測するのに使われるのが「レーザー高度計(LIDAR)」と「近距離レーザー測距計(LRF)」である。小惑星表面までの距離が正確に分からなければ、探査機は激突して壊れてしまうかもしれない。安全にタッチダウンするためには、これらの機器が正常に動作することが重要だ。
近距離~遠距離で使われるのがLIDARで、極近距離で使われるのがLRF。どちらも、初号機で搭載されていた装置であるが、このうち「はやぶさ2」で大きく改良されたのはLIDARだ。何がどう変わったのか、初号機に続き、「はやぶさ2」でもLIDARの開発を担当した宇宙航空研究開発機構(JAXA)/月・惑星探査プログラムグループ(JSPEC)の水野貴秀准教授に話を聞いた。
 宇宙航空研究開発機構(JAXA)/月・惑星探査プログラムグループ(JSPEC)の水野貴秀准教授
宇宙航空研究開発機構(JAXA)/月・惑星探査プログラムグループ(JSPEC)の水野貴秀准教授- リュウグウより小さい直径わずか30mの小惑星へのタッチダウンは可能か?~拡張ミッション【後編】~
- 今も働き続ける「はやぶさ2」、プラス10年以上もの長旅に耐えられるのか~拡張ミッション【前編】~
- かくして「はやぶさ2」は帰還し再び旅立った、完璧な成果は3号機につながるのか
- 2つの改良でより確実なサンプルリターンへ~再突入カプセルの仕組み【後編】~
- 1万℃の高熱から貴重なサンプルを守れ!~再突入カプセルの仕組み【前編】~
- 新型μ10の3つの改良点、次世代型はDESTINY+へ~イオンエンジンの仕組み【後編】~
- はやぶさ2が遥か彼方の小惑星に行って戻れる理由~イオンエンジンの仕組み【前編】~
- 「はやぶさ2」第2回タッチダウンの全貌、60cmの着陸精度はなぜ実現できたのか
- 「はやぶさ2」は舞い降りた、3億km彼方の星に、わずか1mの誤差で
- 車輪なしでどうやって移動する?ローバー「ミネルバ2」の仕組み(後編)
- はやぶさ2から小惑星に降り立つローバー、「ミネルバ2」の仕組み(前編)
- 光で距離を測って安全に降下せよ! ~レーザー高度計(LIDAR)の仕組み~
- 「はやぶさ」「あかつき」の苦難を糧に ~化学推進系の信頼性対策【後編】~
- 「はやぶさ2」は重大トラブルを回避する安心設計 ~化学推進系の信頼性対策【前編】~
- はやぶさ2は燃え尽きない! そのまま別天体へ向かう可能性も ~ミッションシナリオ【後編】~
- はやぶさ2は小惑星までどうやって向かうのか? ~ミッションシナリオ【前編】~
- 爆発までの40分間で小惑星の裏側に退避せよ! ~インパクタの役割と仕組み【後編】~
- 小惑星に人工クレーターを作れ! ~インパクタの役割と仕組み【前編】~
- もう「チリ」なんて言わせない、はやぶさ2ならグラム単位も!? ~サンプラーの仕組み【後編】~
- 小惑星イトカワの微粒子はこうやって採取された! ~サンプラーの仕組み【前編】~
- 最新技術で生まれ変わる小惑星探査機「はやぶさ」
長さ3mの“光の矢”で距離を計測
まずは、LIDARの計測原理から説明を始めよう。
LIDARが距離を測る“物差し”として利用するのはレーザー光だ。レーザーを物体に照射すると、その一部が表面で反射されて戻ってくる。光の速度は一定(30万km/s)と分かっているので、反射光を検出し、往復に要した時間を正確に計測できれば、物体までの距離は「光速×時間÷2」として簡単に割り出せるというわけだ。この仕組み自体は、地上でも広く利用されている。
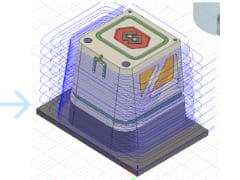
下図は、LIDARの構造を示したものだ。
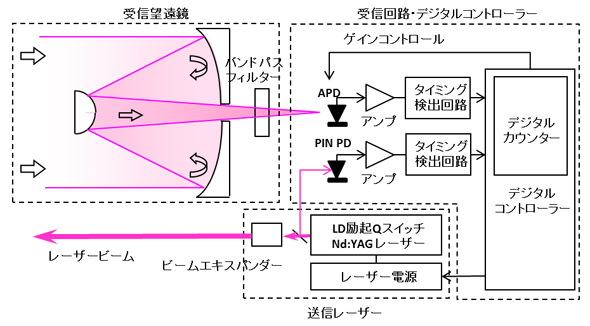 LIDARの構造図。大きく3つのパートに分かれている
LIDARの構造図。大きく3つのパートに分かれている中央下のブロックがレーザー送信部。ここで生成されたレーザーが、ビームエキスパンダーと呼ばれる光学系で指向性をさらに高め、小惑星に向けて射出される。レーザーはパルス状になっており、1秒に1回出力する(つまり、1秒に1回の頻度で計測することができる)。パルスの幅は10ns程度なので、光の速度から計算すると、長さ3m程度の光の矢を放っているようなイメージになる。
反射光を集めるのが左上の光学望遠鏡である。距離が30km程度も離れると、反射光の強度は数10兆分の1という極めて微弱なものになる。そのため、ここでは有効径が110mmという大きなカセグレン型の望遠鏡が採用されている。
受信した光は、右側の回路にあるAPD(アバランシェフォトダイオード)で電流に変換。アンプで適当な電圧レベルに調整して、受信を検出する。また、送信光の一部をPIN PD(PIN型フォトダイオード)でモニタリングしており、この送信と受信のタイミングの差から距離を計算する。
初号機に搭載されたLIDARと、「はやぶさ2」に搭載されるLIDARを見比べると、外観は非常に良く似ていることが分かる。サイズや重量もほぼ同じだ。これには、探査機の大きさが同等である以上、LIDARの大きさもそれほど変えられないという事情がある。


レーザーの出力も同等なのだが、計測レンジは初号機が50m~50kmであったのに対し、「はやぶさ2」では30m~25kmとなる。この違いは、小惑星の反射率(アルベド)の違いに起因するものだ。「はやぶさ2」の目的地である小惑星1999JU3は、初号機のイトカワよりも反射率が低いと予測されており、その分、反射光が弱くなるため、レンジが短くなるのだ。ただ、運用時の基本的な計測レンジとなるホームポジションは20km程度になる見込みなので、運用上問題はないそうだ。
| はやぶさ初号機 | はやぶさ2 | |
|---|---|---|
| 計測レンジ | 50m~50km | 30m~25km |
| 計測精度 | ±1m(50m時)/±10m(50km時) | ±1m(30m時)/±5.5m(25km時) |
| 分解能 | 1m | 0.5m |
| 計測周期 | 1Hz(1秒に1回) | |
| 表1 LIDARの仕様 | ||
Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -

- EDA�ス�ス騾趣スッ陝�謌頑ー幄怺�ス�ス�ィ�ス�ュ鬮ォ�ェ鬩幢ソス�ソ�ス髯キ讎贋セ幄據�ァ�ス�ス陝イ�ィ郢晢ス、驛「譎「�ス�シ驛「譎「�ス�ォ驍オ�コ�ス�ッ驍オ�コ�ス�ゥ驍オ�コ�ス�ス遶剰ご�ク�コ�ス�カ�ス�ス雋�シ可�つ驛「譎「�ソ�ス邵コ蛟。�ケ�ァ�ス�、驛「譎「�ス�ウ驛「�ァ陷サ闌ィ�ソ�ス髯キ逕サ�コ蛟ェ�ス髯晢ソス�シ�ア�ス�・驍オ�コ雋�∞�ス竏ォ�ク�コ�ス�ョ鬩穂シ慊�ゥ�ス�ィ�ス�」
- FPGA鬮ォ�ェ�ス�ュ鬮ォ�ェ陋ケ�サ遶企豪�ク�コ驗呻スォ�ス�ス驛「�ァ髫ェ遽ュT4驍オ�コ�ス�ィLUT6驍オ�イ遶擾スオ�ス�ッ驕呈汚�ス�シ�ス�ス�ス�オ陷亥沺�」�。驍オ�コ�ス�ォ鬮ォ遨ゑスケ譎「�ス邇厄スォ�、�ス�ァ鬮「�ュ�ス�ス驍オ�コ�ス�ョ鬯ゥ謌奇スシ雋サ�シ�ス
- 驛「譏懶スク螂�スソ�ス驛「譎擾スウ�ィ邵コ閧イ�ケ�ァ�ス�ァ驛「�ァ�ス�「鬮ォ�ェ�ス�ュ鬮ォ�ェ陋ケ�サ遶頑・「諤擾ソス�ケ鬩搾ソス�ソ�ス遶雁ョ夲スュ貅ス�「謇假スス�サ雋顔撻ツ�ス�ァ驛「�ァ陋幢スオ�ス繧会スク�コ雋�∞�ス閾・�ク�コ陷キ�カ�つ遶丞」ケ��Δ�ァ�ス�ケ驛「譎会ス」�ッ郤�スセ鬮ォ謌頑ぅPGA鬮ッ�ャ�ス�ス髯キ�ゥ遶擾スォ�ス�セ�ス�、驍オ�コ�ス�ィ驍オ�コ�ス�ッ�ス�ス�ス�ス
- [MONOist鬩搾スア�ス�ィ鬯ョ�ョ�ス�ス�主脹 鬩搾スィ�ス�ス遶擾スゥ鬮エ雜」�ス�シ驍オ�コ�ス�ソ髫カ蛹�スコ�キ陷搾ス」髯キ�キ闔会ス」�ス�ス驛「�ァ�ス�オ驛「�ァ�ス�、驛「譎�ソス�ス�ス驛「�ァ�ス�サ驛「�ァ�ス�ュ驛「譎「�ス�・驛「譎「�ス�ェ驛「譎「�ソ�ス邵コ�ス豎橸ソス�セ鬩包スイ隰費スカ�ス�ス髯キ讎贋セ幃ャョ�ス蝮。�ス�ソ髫エ貊ゑスス�サ
- [MONOist鬩搾スア�ス�ィ鬯ョ�ョ�ス�ス�主脹 驛「譎「�ス�ェ驛「�ァ�ス�「驛「譎「�ス�ォ驛「�ァ�ス�ソ驛「�ァ�ス�、驛「譎「�ソ�スOS髯具スサ陟搾スコ�ス�シ隴擾スエ遶擾スェ驍オ�コ�ス�ィ驛「�ァ�ス�ス�ス�シ髢ァ�イ�ス�ャ�ス�ャ31髯懃軸�ゥ�ク�ス�ス�ス�ス35髯懃軸�ゥ�ク�ス�シ�ス�ス

Special Contents 1
- PR -

Special Contents 2
- PR -

Special Site
- PR -

Pickup Contents
- PR -

鬩幢ス「�ス�ァ�ス�ス�ス�ウ鬩幢ス「隴趣ス「�ス�ス�ス�シ鬩幢ス「隴惹シ夲スス�ソ�ス�ォ�ス�ス�ス�ス鬩幢ス「隴趣ス「�ス�ス�ス�ェ鬩幢ス「隴趣ス「�ス�ス�ス�ウ鬩幢ス「�ス�ァ�ス�ス�ス�ッ
組み込み開発の記事ランキング
- ブレッドボードの表裏を使ってFPGA評価ボードの万能UI「dpad」を新生させる
- 産総研の最新スパコン「ABCI 3.0」が生成AIの研究開発と社会実装を加速する
- 米中が先行する汎用ロボット、日本がロボット大国に返り咲くには何が必要なのか
- 大阪・関西万博の体験型パビリオンは競争率が高過ぎてビビる
- 車載マイコンで快走のインフィニオン、なぜRISC-Vを採用するのか
- インフィニオンの機械学習向けマイコンが「NVIDIA TAO」をサポート
- LTE不感エリアでWi-Fi HaLowを活用したドローン実験を実施
- CAN通信におけるデータ送信の仕組みとは?
- 45万人だけが参加できる万博のパナソニックパビリオン、半年かけた実証実験も
- CANプロトコルを理解するための基礎知識
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。