無意識の動作で未来を予測「ドライバー挙動解析渋滞予測」:5分でわかる最新キーワード解説
クルマの混雑状況を観測するのではなく、ドライバーの無意識下の動作を解析することで渋滞を予測をするのが「ドライバー挙動解析渋滞予測」です。実用化は先ですが、カーナビに搭載して渋滞予測を表示するような実装が考えられます。
今回のテーマは、自動車の運転中に、交通の状況に合わせて無意識に行う運転操作を解析すると、渋滞の前兆が予測可能になるという「ドライバー挙動解析渋滞予測」技術。全く新しい視点からの渋滞予測へのアプローチにより、より早い時点での渋滞回避が可能になり、ストレスフリーのドライブができるようになるかもしれません。
「ドライバー挙動解析渋滞予測」技術とは?
自動車を運転するドライバーが無意識に行うブレーキ操作や加速操作、ハンドル操作などの計測可能なデータを元に、人間では予測できない未来の交通渋滞を予測する技術のこと。芝浦工業大学システム理工学部機械制御システム学科の伊東敏夫教授が2015年1月に発表した。
インフラに依存しない渋滞予測の方法を追求
道路の渋滞は、混雑状況に従った車の減速によって起きるのが常識だが、いつ渋滞が起きるのかを事前に察知するのは難しい。交通渋滞で国内で損失する時間は国民1人当たり年間約30時間と言われ、経済損失は約11.6兆円にのぼるという。
その解消のために道路交通情報通信システム(VICS)が主要道路に備えられ、道路上のカメラなどで交通状況を観測して渋滞状態を把握、カーナビに配信して知らせるシステムが普及しているが、残念ながらそのインフラはいまだ一部で整備されているにすぎず、利用できるエリアは限られている。
そこで、大掛かりなインフラを用意しなくとも、自動車から得られる情報だけで、その先で起こりうる渋滞を予想すれば、適切なタイミングで迂回することができるのではないか、と考えたのが伊東教授だ。
渋滞を回避したい思いは誰しも同じ。しかし実際に道路が混んできて渋滞が起き始めてからでないと、それに気付くことができず、迂回したくとも時既に遅し、という経験を持つドライバーは多いはずだ。もし、人間が渋滞の前兆に気付くよりも早く、これから起きる渋滞を確度高く予測できれば、よくある「しまった!」経験を少なくできるだろう。
伊東教授は、渋滞が起きていない状態(自由走行相)と、渋滞が起きた状態(渋滞相)との間にある、速度が低下してはいないが道路が混み始めている状態(メタ安定相)に渋滞の前兆が潜んでいると考えた。図1にそのメカニズムを示すが、図中のグラフは時間の経過に従った道路上の車両密度を横軸にとり、道路上の車両の流量を縦軸にとった実測値だ。
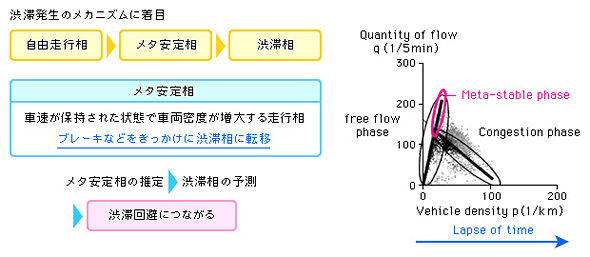 図1 渋滞発生のメカニズム(資料提供:芝浦工業大学 運転支援システム研究室)
図1 渋滞発生のメカニズム(資料提供:芝浦工業大学 運転支援システム研究室)グラフから明らかなように、車両密度がある臨界点に達すると、急激に流量が低下していく傾向が見られる。つまり、道路に車両の数が多くなると車速がどんどん低下していき、渋滞が生じている状態になるわけだ。だがその臨界点の近くでは、流量が低下しているわけではないのに車両密度が増している状態があることが分かる。
その状態ではドライバー自身は車の速度は変わらないので「混みだした」ことになかなか気付けない。ドライバーが自覚できないこのような状態、すなわちメタ安定相にやがて移行することを、自動車自身が前もって予測できれば、警告を発して迂回ルートを選べるように誘導し、渋滞を回避できるのではないか。これがこの研究のポイントだ。
ドライバーの無意識化の操作を計測して渋滞への移行を予測
問題は、メタ安定相に向かっているのかどうかをどうやって判断するかだ。
VICSシステムが運用されているエリアなら、カメラで対象エリアを鳥瞰して交通状況が把握できるが、そうでないエリアでは不可能。それを現状でも計測可能な情報から把握する方法がないかを模索している時、伊東教授の頭脳にある論文がひらめいた。それは1980年代のベンジャミン・リベット(米)の研究(「関連するキーワード」の項参照)で、人間が動作するときに脳から各筋肉にどのタイミングで信号が送られるのかを調べた実験をまとめた論文だ。その結論は、人間の脳は動作を意識するより先に行動に向けた準備をしているというものだった。
伊東教授は「ドライビングにおいてのさまざまな動作も無意識下で行われており、意識はそれを追認しているだけ」だと考えた。道路に車両が増えてくると、自然にブレーキを踏む回数が多くなり、加速の仕方やハンドル操作も変化してくる。だが通常その変化はドライバー自身に明確に意識されることはない。特に危険回避の場合などは「ブレーキを踏んでから、ブレーキを踏んだことを意識する」という状態で、車の運転は体が学習した内容から外的な刺激に反応して無意識に行われている。それに、ドライバーの意識には浮かばないほどの微妙な交通状況の変化が反映されるのではないか。そこに渋滞の前兆となるメタ安定相への移行に伴う何らかの傾向が見えるかもしれない。
走行相の変化をとらえるには、ドライバーの挙動の特徴を各走行相で記録し、走行相の判別に適する特徴量を求める必要がある。それができれば各走行相のドライバーの挙動がモデル化でき、自由走行相からメタ安定相への移行がドライバーに意識されるよりも前に予測できる可能性がある。
その特徴量を求めるために、模擬走行実験ができるドライビングシミュレータ(図2)が用いられた。伊東教授はそもそもダイハツで衝突防止システムの開発などを担当した技術者であり、ドライビングシミュレータを自身で開発した経験も持つ。
その経験を生かし、ドライバーの無意識化の挙動を計測して、自由走行相からメタ安定相への移行でどのように挙動が変化するのかを確かめた。ドライビングシミュレータには実際の車両と同等の運転席が再現され、フロントガラスやミラーにはそれぞれシミュレーション画面が同期して映し出される。ここに被験者が座り、壁を隔てた隣のコンソールで設定する走行シナリオに沿って運転操作を行い、その操作状況を逐一数値化して記録する仕組みだ。
 図2 模擬走行実験に使われたドライビングシミュレータ (左上)外観、(右上)運転席、(左下)模擬走行画面、(右下)コンソールを操作する伊東教授(資料提供:芝浦工業大学 運転支援システム研究室)
図2 模擬走行実験に使われたドライビングシミュレータ (左上)外観、(右上)運転席、(左下)模擬走行画面、(右下)コンソールを操作する伊東教授(資料提供:芝浦工業大学 運転支援システム研究室)Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CANプロトコルを理解するための基礎知識
- ソニーのLPWA「ELTRES」の通信モジュールが機能追加、システムの簡素化が可能に
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 【問題7】10進数を2進数に変換するプログラム
- テスト消化曲線とバグ発生曲線の7パターン診断
- 6Gに向けたサブテラヘルツ帯対応無線デバイス、100Gbpsの超高速伝送を実証
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。