ステッピングモーターの制御:Arduinoで学ぶ基礎からのモーター制御(7)(1/5 ページ)
前回までは“マブチモーター”に代表される「直流ブラシ付きモーター」を、マイコン(Arduino)で制御する方法を紹介してきました。今回からは「ステッピングモーター」の制御に取り組みます。
段階的に回る「ステッピングモーター」
今回取り上げる「ステッピングモーター」は精密制御に欠かせないモーターの1つです。モーター内部の回転子(ローター)へN極とS極の磁石が、歯車のように(交互に)配置されており、フレーム側に固定された電磁コイルにパルスを与えると回転子が決まった角度を移動(回転)します。
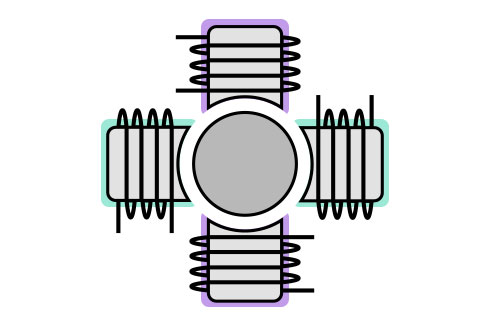 ステッピングモーターの構造。フレーム側に固定された電磁コイルに通電させることで回転子を回転させます
ステッピングモーターの構造。フレーム側に固定された電磁コイルに通電させることで回転子を回転させます「モーター」いえば「通電すると軸が360度、回転し続けるデバイス」という印象ですが、ステッピングモーターは「回転子が決まった角度を連続して移動(回転)するデバイス」です。この決まった角度を「ステップ」(ステップ角)と呼び、モーターの総磁極数で異なります。
制御という観点から見れば、回転角度をセンサーでとらえフィードバックしながら回転を制御することに比べて、開(オープン)ループの制御が可能なので、システム単純化と高精度な制御を両立させることができます。
そして、ステッピングモーターには巻き線の電流を1方向に流す「ユニポーラ型」と、巻き線の電流を双方向に流す「バイポーラ型」と2つのタイプがあります。今回はユニポーラ型のステッピングモーターを制御します。これらの制御には専用のドライブICを使うことが多いのですが、今回は基本に重きを置きたいのでトランジスタを使いてドライバー回路を作製します。
タクトスイッチで動かしてみる
ここではまずステッピングモーターの基本的な動作を確認するため、手動(マイコンでパルスを与えるのではなく、タクトスイッチのON/OFF)で動かしてみることにします。今回はステッピングモーターとして、手元にあったパナソニック「55SPM25D7」を利用しました。
この「55SPM25D7」は既に生産終了していますが、一般的なユニポーラ型ステッピングモーターといえる製品です。タクトスイッチで駆動する場合は他のユニポーラ型ステッピングモーターでも問題ありません。ただし、連載の中では、トランジスタでの駆動にも言及しますので、購入する場合には55SPM25D7に似た電気特性のステッピングモーターの入手をおすすめします。
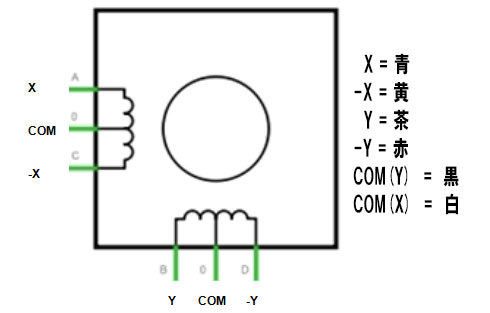
以下に55SPM25D7のピン配列およびリード線の色を示します。リード線の色は他のステッピングモーターでは異なることもありますのでデータシート等で確かめてください。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- CAN通信におけるデータ送信の仕組みとは?
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- 景気減速でソフト開発の脆弱性対応が後手に? SBOM整備の取り組みも足踏みか
- CANプロトコルを理解するための基礎知識
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。