無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!:無償3D CADレビュー(1/5 ページ)
今回は設計公式を基にリンクの動作を計算する方法と、FreeCADの編集機能を使った設計を紹介する。今回のテクニックを応用すれば干渉チェックも可能だ。Excel計算シート付き!
リンク機構を設計する
リンク機構とは、複数のリンクの組み合わせからなる機構のことです。リンクの組み合せにより、複雑かつ、正確な動作を行わせることが可能であり、機械設計における基本要素の1つです。
MONOistではリンク機構に関する記事が人気ですが、そこでは設計方法までは説明していません(関連記事:メカメカリンクで設計しよう(1):自由度と、リンク機構の基本のいろいろ)。
何事も基礎を理解することは大切ですが、必要に迫られて設計しなくてはいけないという人も多いかと思います。そこで、今回は、代表的なリンク機構である4節リンクを例に、リンク機構を設計してみます。設計の手段として、設計公式を基にリンクの動作を計算する方法と、FreeCADの編集機能を使った設計とを紹介します。
⇒ 新連載「無償3D CAD『FreeCAD』を使ってみよう」公開中
4節リンクと設計公式
4節リンクとは、図1に示すような4本のリンクがつながったものです。

リンクとは、ジョイントとジョイントをつなぐ部分で、図1では、辺a、b、c、dが相当します。実際の部品では、幅や厚みを持ったり、湾曲したりしていますが、機構設計ではジョイントとジョイントとを直線で結んだものをリンクと称します。
4節リンクでは、O1とO2が固定されていて、bがO1を中心に回転すると、dがO2を中心に搖動運動を行います。回転運動を搖動運動に変換する例が、自動車のワイパーであり、逆に、搖動運動を回転運動に変換する例が、足踏み式ミシン(博物館でしか見られないと思いますが)の動力部分です。
図1で、辺a、b、c、dの長さを変えると、Pが描く軌跡が変わります。従って、4節リンクの設計とは、Pが描く軌跡が所望の形に近くなるように、辺a、b、c、dの長さを求めることになります。同時に、辺bがO1を中心に連続して回転できることも必要となります。
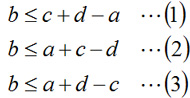
辺bが連続して回転できる条件が、下記に示すグラスホフの定理です。辺bが連続して回転できるためには、辺bの長さは(1)式から(3)式を満足する必要があります。
辺a、b、c、dの長さが、グラスホフの定理を満足したら、Pの軌跡から辺a、b、c、dの長さを決めることになります。しかし残念ながら、Pの軌跡から直接、辺a、b、c、dの長さを求めることは、複雑な問題であり、通常は、適当に決めた辺a、b、c、dの長さからPの軌跡を求めて、所望の形状か判断するといった作業を繰り返します。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- Formlabsが新型3Dプリンタ「Form 4」発表、LFSを超えるプリントエンジンを採用
- 有限要素法入門 〜連立方程式の解法、変位の計算〜
- 3σと不良品発生の確率を予測する「標準正規分布表」
- ムダのない作業と楽しさをもたらす“ありそうでなかった発想”
- SUBARUが深層学習によるAI構築ツールを導入、プレス領域の成形解析工数の削減へ
- 知らないと取り返しがつかなくなる金型の費用と作製期間の話
- 幾何公差の基準「データム」を理解しよう
- フローで考える流れのモデリング(その2) 〜適用例と3D/1Dの関係〜
- 計算時間が従来比最大1000倍高速な流体解析ベースのトポロジー最適化ソフト
- 「設計者はなぜCAEを煙たがるのか」を考察し、広がりを阻害する壁を取り除く



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。