完全自動運転車を組み込みシステムで動かすには何が必要か:eSOL TECHNOLOGY FORUM 2016レポート
「eSOL TECHNOLOGY FORUM 2016」に、東京大学大学院情報理工学系研究科 准教授の加藤真平氏と、イーソル 執行役員 ソフトウェア技術統括責任者 兼 技術本部長の権藤正樹氏が登壇。加藤氏は完全自動運転車の開発に向けた取り組みについて、権藤氏は自動運転車を実現するためのスケーラブルなソフトウェア開発手法について講演した。
国内組み込みソフトウェアベンダーとして40年以上の歴史を重ねてきたイーソル。現在も、車載ソフトウェア分野をはじめ、FA・産業機器、宇宙航空機器、コンシューマ製品などの分野で大きな存在感を放っている。同社は2016年9月27日、東京コンファレンスセンター・品川において「eSOL TECHNOLOGY FORUM 2016」を開催し、約200人が参加した。
今回のテーマは「IoT時代のソフトウェアプラットフォーム~自動運転などの組込みシステムの知能化を支えるスケーラビリティ」だ。基調講演には、オープンソースの自動運転ソフトウェア「Autoware」の開発で知られる東京大学大学院情報理工学系研究科 准教授の加藤真平氏が登壇。引き続く講演では、イーソル 執行役員 ソフトウェア技術統括責任者 兼 技術本部長の権藤正樹氏が、自動運転車を実現するためのソフトウェア開発手法について説明した。
PCベースの自動運転システムを消費電力20Wの組み込みシステムへ
 東京大学大学院情報理工学系研究科 准教授の加藤真平氏
東京大学大学院情報理工学系研究科 准教授の加藤真平氏加藤氏は「完全自動運転に向けたコンピューティングとシステム安全」と題して、アクセルやブレーキ、ハンドル操作のいらない完全自動運転車の開発に向けた取り組みについて講演した。同氏は2015年度まで、名古屋大学大学院情報科学研究科の准教授として、自動運転車の開発に取り組み、Autowareをはじめさまざまな成果を得てきた。「数年かけて開発してきた自動運転車の完成度はかなり高まっており、現在は時速50~60kmの速度であれば市街地の自動運転が可能なレベルに達している。愛知県内の15市町村で自動運転車の走行実験を行うなど、社会受容性の確認も進められている」(同氏)という。
加藤氏が開発している自動運転車は、センサーとして車載カメラとライダー(LIDAR)を使用している。両センサーを使って車両周辺の認識や、認識した車両などの追跡(トラッキング)を行うとともに、ライダーによる3次元レーザースキャンの結果から高精度3次元地図データとの重ね合わせによる自車位置推定を行う。また3次元レーザースキャンの結果を、3次元地図データとしてクラウドで共有する仕組みも作り出した。
現在課題となっているのが、複数車線を走行する場合の車線変更や、交差点での右折/左折などを行う際に最適な軌道を算出する「軌道生成」だ。加藤氏は「人工知能(AI)などはこの段階から必要になる」と語る。
そしてもう1つの課題が、自動運転システムの組み込みシステム化である。現在の自動運転システムは全てPCで構築しているが、量産車に搭載するには、省電力化、リアルタイム化、高信頼化した組み込みシステムに仕立てる必要がある。
この自動運転システムの組み込みシステム化について、イーソルと加藤氏は共同で取り組みを進めている。2015年11月に開催された「あいちITSワールド」では、フランスのベンチャー企業・Kalrayのメニーコアプロセッサと、イーソルのシングルコアプロセッサからマルチ・メニーコアプロセッサまでをスケーラブルにサポートする世界初の商用リアルタイムOS「eMCOS(エムコス)」によって、消費電力20W程度の組み込みシステム上でAutowareを動作させた自動運転車のデモ走行を行った。従来のPCで構築した自動運転システムと同等の機能を、省電力、リアルタイム性、高信頼性を確保しながら発揮することが可能になるという。
知能化技術の素早い製品展開に求められるスケーラブルなソフト開発手法
 イーソル 執行役員 ソフトウェア技術統括責任者 兼 技術本部長の権藤正樹氏
イーソル 執行役員 ソフトウェア技術統括責任者 兼 技術本部長の権藤正樹氏加藤氏に続いて、イーソルの権藤氏は「スケーラブルなソフトウェア開発手法」と題した講演を行い、自動運転車をはじめとするインテリジェント(知能化)機器の開発要件や、どのようなリアルタイムOSが求められているかについて説明した。
同氏がインテリジェント機器の開発要件として挙げたのが、知能に必要な処理性能と電力だ。人間の脳は10T(1012)~10Yotta(1025)FLOPSの処理能力があるといわれている。中間をとると1Exa(1018)FLOPSだ。この処理能力に対する消費電力は20Wにすぎない。
これに対して最新ハードウェアの消費電力は、理化学研究所がExaFLOPSレベルの処理性能の実現を目指しているExa-scaleシステムで30MW、NVIDIAのサーバ用GPU「Tesla K80」で1.87TFLOPS/300W、先述のKalrayのメニーコアプロセッサで1TFLOPS/20Wだという。権藤氏は「人間の脳と比べればまだまだ消費電力は大きい。どの最新ハードウェアを見ても並列化は不可欠だが、AIに関して言えば近年注目されているディープニューラルネットワーク(DNN)だけでは限界がありそうだ」と語る。
機器の知能化は、これら最新ハードウェアを用いたハイエンド製品から始まるのは確実だ。「しかし、製品開発の観点で考えれば、その知能化技術をミドルレンジからローエンドまでの製品に素早く展開できなければならない。そのためにもプロダクトラインに対応したスケーラブルなソフトウェア開発手法が必要だ」(権藤氏)という。
さらに同氏は、これからは、IoTを実現する分散システムに対応するスケーラビリティが求められるとする。例えば自動運転車では、認知・判断・操舵を含むさまざまなアプリケーションがそれぞれ自律協調している。こうした分散システムでは、ヘテロジニアスなハードウェア構成をとる。アプリケーションの要件に合わせて、マイクロコントローラ、CPU、GPUやFPGA、メニーコアプロセッサなど異なるハードウェアリソースをそれぞれの特長を活かして選択し、それらを組み合わせることによって、最も優れた電力性能効率を実現できる。
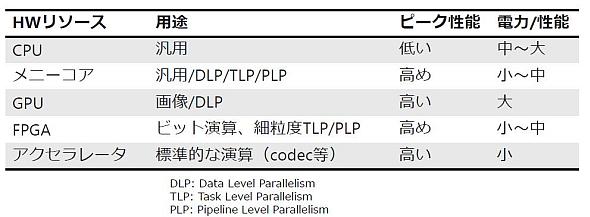 各種プロセッサアーキテクチャの比較。ハードウェアリソースによって特性が異なる
各種プロセッサアーキテクチャの比較。ハードウェアリソースによって特性が異なるここで問題になるのが、コア数、ハードウェアアーキテクチャの違いを吸収するリアルタイムOSの有無だ。もともとシングルコアプロセッサ向けに開発された従来のリアルタイムOSは、そのコンセプトとアーキテクチャから、マルチコアプロセッサより多くのプロセッサコアを搭載するメニーコアプロセッサまでサポートを広げるには限界があった。
イーソルのeMCOSは、小型のマイクロカーネルを各コアに配置し、分散マイクロカーネルアーキテクチャを採用しているため、実行ハードウェアのコア数やアーキテクチャの違いにスケーラブルに対応できる。コア間通信、プロセッサ間通信は、分散コンピューティングに適したメッセージパッシングで行う。階層型スケジューリングにより、リアルタイム性とスループットの両立を果たしており、コア/クラスタ単位でスケジューリングを並列実行する機能も用意した。
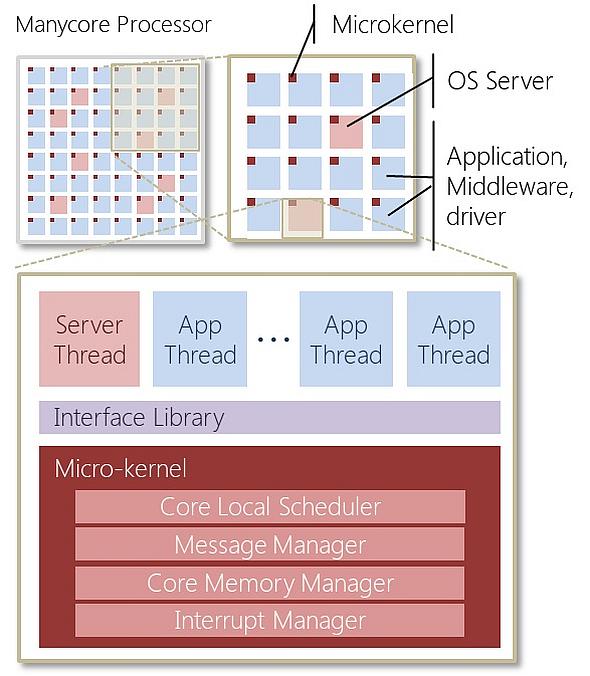 分散システムの実力を引き出す分散マイクロカーネルのイメージ。イーソルは256コアのメニーコアプロセッサを用いた実証も行っている
分散システムの実力を引き出す分散マイクロカーネルのイメージ。イーソルは256コアのメニーコアプロセッサを用いた実証も行っているメニーコアプロセッサのプログラミングで課題となる並列化についても独自にツールを用意している。一般的に制御アルゴリズムの並列化は難しいとされているが、制御アルゴリズムの設計に広く用いられているSimulinkモデルから並列化ソースコードを出力できる「eSOL MBP(Model Base Parallelizer)」を開発した。名古屋大学枝廣研究室との共同研究開発成果を商品化したもので、2017年4月に正式リリースする予定だ。
 多くの来場者が集まった「eSOL TECHNOLOGY FORUM 2016」
多くの来場者が集まった「eSOL TECHNOLOGY FORUM 2016」提供:イーソル株式会社
アイティメディア営業企画/制作:MONOist 編集部/掲載内容有効期限:2016年11月25日
Copyright © ITmedia, Inc. All Rights Reserved.
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。