
マシンビジョンのアプリとコンポーネント:いまさら聞けないマシンビジョン入門(2)(1/4 ページ)
製造現場のプロセス自動化や品質向上に役立つマシンビジョンの基礎知識をお伝えする本連載。第2回はマシンビジョンのアプリとコンポーネントについて紹介する。
マシンビジョンのアプリケーションの4大カテゴリー
マシンビジョンにはさまざまなアプリケーションがあるが、どのようなマシンビジョンアプリケーションでも、最初のステップはパターンマッチングテクノロジーを使用して、カメラの視野から目的の対象物や特徴を検出することになる。目的の対象物の検出が成功する場合も失敗する場合もある。パターンマッチングソフトウェアツールが画像からパーツを正確に検出できなければ、パーツのガイド、識別、検査、カウント、測定はできない。パーツの検出といえば単純そうだが、実際の製造現場におけるパーツの外観の違いにより、このステップが難しい場合も多い(図1)。
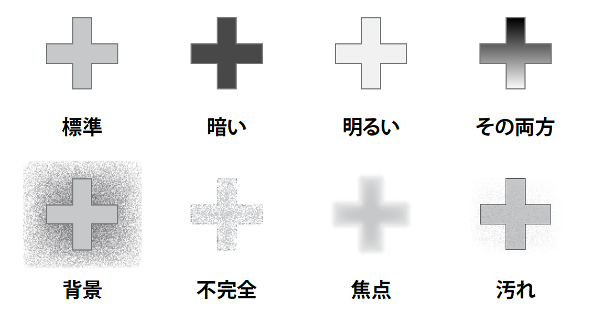 図1 パターンマッチングのイメージ。照明または遮蔽を原因とする外観の変化により位置決めが難しくなる 出典:コグネックス
図1 パターンマッチングのイメージ。照明または遮蔽を原因とする外観の変化により位置決めが難しくなる 出典:コグネックスさらに、ビジョンシステムは登録されたパターンに基づいて部品を認識するが、厳密に制御された工程であっても、部品の外観にはばらつきが生じる(図2)。
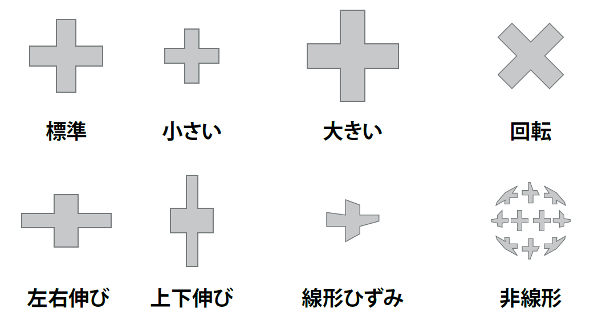 図2 パーツの見栄えやゆがみの影響で、パーツの位置決めが難しくなる場合もある 出典:コグネックス
図2 パーツの見栄えやゆがみの影響で、パーツの位置決めが難しくなる場合もある 出典:コグネックス正確で信頼性が高く、再現性のある結果を得るためには、ビジョンシステムの位置決めツールには、生産ラインを流れていく実際の対象物と登録パターンを素早く正確に比較(パターンマッチング)できる能力が必要である。位置決めは、マシンビジョンアプリケーションの4大カテゴリーにおける重要な最初のステップとなる。4大カテゴリとは、位置決め(Guidance)、認識(Identification)、測定(Gauging)、検査(Inspection)で、頭文字をとって「GIGI」と呼ばれる。
位置決め
位置決めには、いくつかのケースがある。まず、マシンビジョンシステムはパーツの位置と向きを検出し、指定された許容値と比較して、正しい角度であることを確認。アセンブリが適切に行われていることを検証する。次に、位置決めを使用して、2次元または3次元空間でのパーツの位置と向きをロボットもしくはマシンのコントローラーに報告。ロボットがパーツを見つけたり、マシンがパーツを並べたりできるようにする(図3)。
マシンビジョンのガイダンスは「パレットにパーツを並べる」「パレットからパーツを降ろす」「ベルトコンベヤーからパーツを降ろして梱包する」「他のコンポーネントとのアセンブリ用のパーツを見つけて並べる」「作業棚にパーツを置く」「容器からパーツを取り出す」などの作業を、人間の手で行うよりも速く、正確に完了できる。
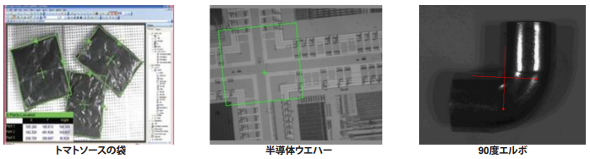 図3 位置決めで使用される画像の例 出典:コグネックス
図3 位置決めで使用される画像の例 出典:コグネックス位置決めは、他のマシンビジョンツールとの連携にも使える。製造中、カメラに対してパーツがどのような向きになるかは分からないため、パーツの位置を発見し他のマシンビジョンツールに連携させることで、自動ツールフィクスチャを実行できる。パーツの重要な特徴を検索して、キャリパ、ブロブ、エッジなどのビジョンソフトウェアツールを正確にパーツと連動させる。これにより、メーカーは同じ生産ラインで複数の製品を組み立てられるようになり、検査中にパーツの位置を固定するための高価な設備は必要なくなる。
位置決めでは、幾何学パターンマッチングが必要になることがある。パターンマッチングツールは、コントラストや照明の大きなばらつきや、スケール、回転などの係数の変化を容認しながら、確実にパーツを検出できなければならない。これは、パターンマッチングで取得された位置情報が、その他のマシンビジョンソフトウェアツールとの連携を実現するからである(図4)。
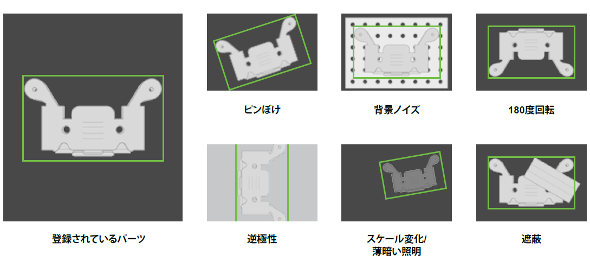 図4 パターンマッチングが困難な例 出典:コグネックス
図4 パターンマッチングが困難な例 出典:コグネックスCopyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- DMG森精機が新たなHMIを開発、高い操作性とDXで製造現場の生産性向上
- HoloLens 2と生成AIで現場作業者支援の新たな姿を見せたマイクロソフト
- ラズパイの電源を入れてみた
- DMG森精機が通期業績見通しを上方修正、欧州や米州の需要が堅調に推移
- 日立がロボットSI事業強化に向けドイツ企業を買収、JRオートメーションと連携
- ミスミはいかに変種変量の短納期生産を実現したのか
- EV市場の拡大見据えリチウムイオン電池材料を生産、旭化成が北米に1800億円投資
- PLCレスで協働ロボットの外部軸を制御、自動化システム構築の工数削減
- PLCを活用した設備統合監視制御システム、履歴データを基にした解析に対応
- 製造現場で使える生成AI、遠隔サポートやロボットコード生成など



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。