
MONOist >
Factory Automation >
柔らかく小さな物でも柔軟につかめる電動3爪ロボッ...
柔らかく小さな物でも柔軟につかめる電動3爪ロボットハンド:FAニュース
シナノケンシは、異型物を柔軟につかめる「電動3爪ロボットハンド」を開発した。製造現場の非定型物や柔らかい物、小さい物を扱う手作業の工程において、自動化移行への提案を進めていく。
» 2017年12月15日 07時00分 公開
[MONOist]
シナノケンシは2017年11月22日、異型物を柔軟につかめる「電動3爪ロボットハンド」を開発したと発表した。3本の爪の開閉により、直径約10~114mmサイズを把持できる。
ステッピングモーターとサーボ制御を組み合わせ、機構部分に特殊なカムを採用。爪が対象物を把持する際のステッピングモーターの電流と回転の変化を計測することで、コントローラーが対象物の柔・硬を判別し、最適な把持力と把持速度を調整・保持する。
また、ロボットハンドとモーターが一体になった構造の中央部に中空(穴)構造を採用。中空の直径はφ8mmで、対象物を把持した状態でさまざまな追加作業を組み合わせることが可能だ。
本体サイズは約42×50×150mm(爪を閉じた状態)で、重さは約750g。電源はDC24Vで、通信インタフェースはRS-485を採用する。さらに、2爪の他、金属や樹脂などの材質にも用途に合わせて変更できるように、爪のバリエーションを開発している。
同社は小物組み立てや食品、医薬品、化粧品などの製造現場での非定型物や柔らかい物、小さい物のため人による手作業が困難な工程において、自動化移行に向けて電動3爪ロボットハンドの提案を進めていく予定だ。
 電動3爪ロボットハンド 出典:シナノケンシ
電動3爪ロボットハンド 出典:シナノケンシ 一体構造の中央部に中空構造 出典:シナノケンシ
一体構造の中央部に中空構造 出典:シナノケンシ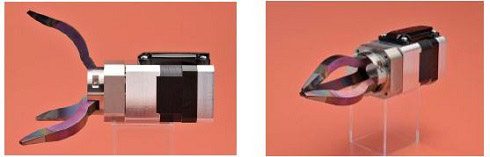 左:爪を最大に開いた場合、右:爪を最小に閉じた場合 出典:シナノケンシ
左:爪を最大に開いた場合、右:爪を最小に閉じた場合 出典:シナノケンシ
「FAニュース」バックナンバー
- 段ボール箱自動組み立て/搬送システム、寸法入力だけの簡単操作
- 点検用巡回ロボットに点検AIを搭載、アナログメーターの点検業務を自動化
- 15軸制御のワイヤ回転式トーションマシン、ばね成形の加工領域を拡大
- 流量管理の自動化を促進する比例電磁弁用コントローラー
- 半導体チップのナノスケール欠陥を分析、AI活用の電子ビーム装置を発表
- 横河が測定速度20倍向上の光スペクトラムアナライザー、本体サイズは半分以下
- 百均の 商品を見て やる気落ち――第11回 現場川柳大賞が決定
- 修復再利用に対応した軸受を新たに開発、NSKが確立目指すPLMモデルの主要製品
- スマート工場化に貢献するMECHATROLINK-4対応インバーター用イーサネットカード
- 真空蒸着で金属箔上にリチウムを成膜、次世代バッテリーの開発などに活用
 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来 リアル過ぎてキモい! タコ足を模したロボットハンド
リアル過ぎてキモい! タコ足を模したロボットハンド 双腕型ロボットが自動でタオルをたたみサラダを盛り付ける、AI学習はVRシステム
双腕型ロボットが自動でタオルをたたみサラダを盛り付ける、AI学習はVRシステム 技術賞は“かしこいロボットハンド”、人とロボットの協働を実現に
技術賞は“かしこいロボットハンド”、人とロボットの協働を実現にCopyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -


Special Contents 1
- PR -

Special Contents 2
- PR -

Special Site
- PR -
Pickup Contents
- PR -

コーナーリンク

Factory Automationの記事ランキング
- 目指すのは省人化ではなく売上増、小売業向け”黒子”ロボは現場に何をもたらす?
- ニデックの牧野フライスTOBに産業別労組反対声明、牧野労組は9割反対
- その対策が脅威に……OTセキュリティで今起きている怖いこと
- 混乱の時代に業界の道筋を示す……ハノーバーメッセ2025が開幕
- 牧野フライスが時間確保目的の買収対抗策導入、ニデック「極めて遺憾」
- 世界シェアトップの測長SEMをDigital&Cleanで生産、日立ハイテクのマリンサイト
- 段ボール箱自動組み立て/搬送システム、寸法入力だけの簡単操作
- ニデックと牧野フライス、TOBを巡る動き
- 半導体故障解析装置などの工場新設、韓国での開発/製造体制を強化
- 点検用巡回ロボットに点検AIを搭載、アナログメーターの点検業務を自動化
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。