
AI協調でロボットとAGVを連携、“動いたまま取る”で作業時間38%短縮へ:協働ロボット(1/2 ページ)
日立製作所は2018年5月28日、複数のAI(人工知能)技術を協調させることで、自律的に走行する無人搬送車(AGV)が運ぶ部品を、AGVを止めることなくピックアップする技術を発表した。
日立製作所は2018年5月28日、複数のAI(人工知能)技術を協調させることで、自律的に走行する無人搬送車(AGV)が運ぶ部品を、AGVを止めることなくピックアップする技術を発表した。実証では作業時間を38%削減することに成功したという。
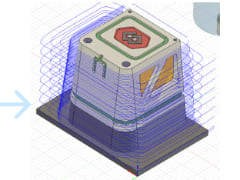
 実証の様子。AGVが画面奥から部品を乗せて移動してくる。奥のカメラで部品を認識し、AIにより最適なピッキング部品と方法を選択。手前のロボットとAGVの速度を協調し減速することなくピックアップが可能となる(クリックで拡大)
実証の様子。AGVが画面奥から部品を乗せて移動してくる。奥のカメラで部品を認識し、AIにより最適なピッキング部品と方法を選択。手前のロボットとAGVの速度を協調し減速することなくピックアップが可能となる(クリックで拡大)AI同士が協調することで新たな価値を
ピッキング作業は物流および倉庫作業の中でも人手の割合が大きく、そのため自動化が望まれている領域である。自動化に向けては、自動搬送を行うAGVと製品のピックアップを行うロボットの活用に注目が集まっている。しかし、現状のロボット技術では、毎回AGVがロボットのピックアップポイントに止まり、それをロボットの画像センサーで撮影し、ロボットがピックアップするという流れであるため、作業時間がかかることが課題となっている。
新たな技術はこの課題を解決することを目指したもの。各種AIを活用し、ピッキング用ロボットと自律走行するAGVを統合制御することで、AGVに積まれた製品群から指定の製品を、AGVを止めることなくピックアップできるという技術である。

仕組みは以下の通りだ。
- 製品を搬送するAGVがカメラ位置を通過する際にケース内の荷積み状態を撮影
- AIによる学習データを基に「ピッキング方法判断AI」が最適に取り出せる製品と最適なピッキング方法を判断し、ロボットとAGVに伝達
- 搬送台車は速度変更などの指示に対応し、自己位置を補正しながら走行しロボットのもとを通過
- ロボットは通過するAGVの動きに合わせて、アーム動作を詳細に計画修正しアーム動作を実施し、指定製品をピックアップ
それぞれに組み込まれたAIが自律的に協調し、詳細な指示なしにも最適な動作を行うということが特徴である。日立製作所 研究開発グループ デジタルテクノロジーイノベーションセンター 主管研究長 守屋俊夫氏は「AIはロボットなど各機器全てに入ってくると考えている。そこを統合するための上位のAIなどが登場しそれぞれが自律的に協調し合う姿を描いている。今回はその一端を示した技術である」と述べている。

Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -

- [MONOist驍ア�ィ鬮ョ�スホ咯 髯ャ�ス鬨セ�ス霑エ�セ陜」�エ陷キ莉」��AI隰堋髯ヲ阮吮穐邵コ�ィ郢ァ�ス�シ�ス2024陝キ�エ8隴幄肩�ス�ス2025陝キ�エ3隴幄肩�シ�ス
- 隰ウ�ャ鬨セ竏オ�・�ュ陷榊生�ス髢セ�ェ陷榊供蝟ァ邵コ謔溷�鬨セ貅伉竏ス�サ鬆托スウ�ィ騾カ�ョ邵コ�ョ郢ァ�オ郢晄じ縺帷ケァ�ッ郢晢スェ郢晏干縺咏ケ晢スァ郢晢スウ陜吩ケ晢ソス髢セ�ェ陷榊「捺�鬨セ竏壹@郢晢スシ郢晁侭縺帷クコ�ィ邵コ�ッ
- [MONOist驍ア�ィ鬮ョ�スホ咯 郢昜ケ昴Ι郢晢ソス縺醍クコ�ィ霑夲スァ鬩・蠑ア繝オ郢晢スゥ郢ァ�、郢ァ�ケ邵イ繧抂B郢ァ雋橸スキ�。郢ァ蜿・陌夂クコ謳セ�シ�ス2024陝キ�エ12隴幄肩�ス�ス2025陝キ�エ2隴幄肩�シ�ス
- [MONOist驍ア�ィ鬮ョ�スホ咯 陷頑ウ後Ο郢晢スュ郢晄㈱繝」郢晏現繝ォ郢晢ス・郢晢スシ郢ァ�ケ邵コ�セ邵コ�ィ郢ァ�ス�シ�ス2024陝キ�エ8隴幄肩�ス�ス2025陝キ�エ1隴幄肩�シ�ス
- [MONOist驍ア�ィ鬮ョ�スホ咯 Automation Fair 2024 霑エ�セ陜ィ�ー郢晢スャ郢晄亢�ス郢晏現竏ェ邵コ�ィ郢ァ�ス

Special Contents 1
- PR -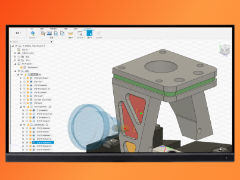


Special Contents 2
- PR -

Special Site
- PR -

Pickup Contents
- PR -

驛「�ァ�ス�ウ驛「譎「�ス�シ驛「譎会スソ�ォ�ス�ス驛「譎「�ス�ェ驛「譎「�ス�ウ驛「�ァ�ス�ッ

Factory Automationの記事ランキング
- ニデックTOBに「反対」表明、牧野フライスのトップは何を語った
- ニデック工作機械会社トップたちは牧野フライスTOBで何を語ったか
- 日立ハイテクが半導体製造装置の新製造棟、生産工程のデジタル化/自動化進展
- オムロンがコグニザントと提携しミリ秒単位の仮想制御基盤開発、5年500億円目指す
- オムロンがNVIDIAと連携で高度なデジタルツイン、装置内部を正確に再現
- ラピダス半導体工場の現状と今後、パイロットライン立ち上げ開始も「まだ一合目」
- DMG森精機は新会社設立でAM事業強化、奈良拠点にAM“量産活用”に標準
- 万博に登場、三菱電機はFA機器とパッションフルーツの“日よけ”で何を生む?
- 光半導体素子の後工程生産能力増強、浜松ホトニクスの新工場が稼働へ
- タイで事業統合される側に回った時の話
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。