刃物のような物体でもつかめる柔軟なロボットハンド開発:FAニュース
東北大学は、とがった物体や柔らかな物体、複雑な形状をした物体などをつかめるロボットハンドを開発した。従来品と比べて、つかめる対象物の範囲が飛躍的に拡大するため、災害復旧現場や工場での作業の効率化が期待できる。
» 2018年07月03日 07時00分 公開
[MONOist]
東北大学は2018年6月14日、とがった物体や柔らかな物体、複雑な形状をした物体などをつかめるロボットハンドを開発したと発表した。
従来の袋型ロボットハンドは、とがった対象物をつかむ際に破れてしまう点が課題だった。今回の研究では、これまでのゴム膜に替えて、袋表面の材料に伸縮性のある防刃生地を用いた。
その防刃生地を、先端が半球形状となる袋状にし、表面に滑り止め用のシリコンゴムを塗布して耐切創性に優れたロボットハンドを開発した。鋭くとがった物に接触したり、刃物で切りつけたりしても、袋とハンド本体を傷つけることなく作業できる。
開発したロボットハンドは、破損したバルブの開閉やガラスの破片、鉄筋が露出した鉄筋コンクリートなど、つかめる対象物の範囲が飛躍的に拡大するため、災害復旧現場や工場での作業の効率化が期待できる。
今後は、繰り返し使用を考慮して耐久性をさらに向上させるなど、同ロボットハンドの実用化を目指した研究を進め、3年以内に実際のがれきに近い環境下で実用性を確認する。さらに、廃品回収用の産業ロボットメーカーなどと協力して事業化を進める予定だ。
 ニッパーの刃部からの把持 出典:東北大学
ニッパーの刃部からの把持 出典:東北大学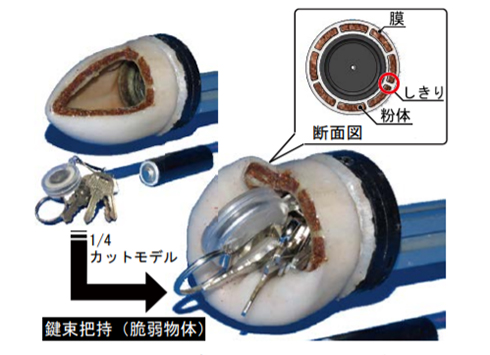 ロボットハンドの構造 出典:東北大学
ロボットハンドの構造 出典:東北大学
「FAニュース」バックナンバー
- RYODENらが生成AIの事業応用で協業、現場映像と設備データの融合も目指す
- トレーサビリティーを強化したトルクメーター、無線通信や波形データに対応
- サーバなど向け、高風量かつ高静圧ながら連続運転10万時間の長寿命な冷却ファン
- パワー半導体の電流測定が正確に、光プローブを用いた電流波形測定用センサー
- ロボットを活用したプラント保守を支援する運用ソフトウェア、Spotなど対応
- 機能特化で小型化と低コスト化を実現したモーター制御製品用ソフトスターター
- 電気、水、エアなど工場インフラ設備の最適運転効率を算出する診断サービス
- 半導体製造工程での異物検出と除去を1台で行う異物検査装置、堀場製作所が発売
- HOYAで複数製品の生産ラインや受注システムが停止、不正アクセスの可能性
- メンテナンス性向上へ、回転ユニット一体型リモートセンサー用ブラケットを販売
関連記事
 気持ち悪いけどすごい! “カメレオンの舌”でつかむロボットハンド
気持ち悪いけどすごい! “カメレオンの舌”でつかむロボットハンド
ドイツのFestoは、ハノーバーメッセ2015において「カメレオンの舌」をモチーフとしたロボットハンドを紹介した。形状の異なるものや柔らかいものを1つのハンドでつかめるのが特徴。 なんだコイツら、動くぞ! 生物型ロボット最前線
なんだコイツら、動くぞ! 生物型ロボット最前線
ハノーバーメッセ2015では工場の未来像の一端として、生物の動きを模した最先端ロボットの出展が数多く行われた。最先端ロボットの動向を取り上げる。 協働ロボット、ロボットシステムに残された課題と未来
協働ロボット、ロボットシステムに残された課題と未来
協働ロボットを現場で活用するのにどのような工夫が必要か――。ロボット技術の総合展示会「2017国際ロボット展」では、ロボットメーカーおよびユーザー企業によるパネルディスカッション「ロボットフォーラム2017」が実施され、協働ロボットの意義について語った。 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- PLCレスで協働ロボットの外部軸を制御、自動化システム構築の工数削減
- タイの半導体製造工場で新棟が完成、ソニーセミコンが生産力を強化
- ハノーバーメッセが開幕、AIや水素など「競争力ある持続可能な産業」の最新技術
- 品質保証とは何か、その定義を改めて考える
- ラズパイの電源を入れてみた
- パワー半導体の電流測定が正確に、光プローブを用いた電流波形測定用センサー
- RYODENらが生成AIの事業応用で協業、現場映像と設備データの融合も目指す
- サーバなど向け、高風量かつ高静圧ながら連続運転10万時間の長寿命な冷却ファン
- IEC 62443とは何か、工場のサイバーセキュリティ対策のカギを握る国際標準を解説
- トレーサビリティーを強化したトルクメーター、無線通信や波形データに対応
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。