日本発世界標準、生活支援ロボット安全規格「ISO 13482」:5分でわかる最新キーワード解説
生活の中に溶け込んでゆくロボット、その安全性を評価するための国際規格が「ISO 13482」です。日本ロボット産業の起死回生への第一歩になるかもしれません。
今回のテーマは、ロボット領域で日本が世界をリードする「生活支援ロボット」の安全性を評価するための国際規格「ISO 13482」。宇宙や軍事領域でのロボット研究では米国の後塵を拝し、産業領域ではヨーロッパやアジア新興国との激しい競争にさらされている日本ロボット産業の、起死回生への第一歩になるかもしれません。
生活支援ロボット安全規格「ISO 13482」 とは
2014年2月1日に正式発行された生活支援ロボットの国際安全規格。2009年から2014年までの5年にわたり経済産業省と新エネルギー・産業技術総合開発機構(NEDO)が推進してきた「生活支援ロボット実用化プロジェクト」の成果が反映された、日本発の世界標準だ。
- 「生活支援ロボット」とは
「生活支援ロボット」は、高齢者や身障者などの日常活動を助ける介護・福祉の他、家事、安全・安心な生活のために利用されるロボットだ。特に少子高齢化が進む中、介護・福祉に従事する労働力の不足が目に見えてきている日本では、これからますます必要性が高まると見込まれている。
既に生活支援のためにさまざまな機器が開発・実用されているものの、利用者本人や周囲の人やモノに対する安全を確保するための基準が未整備で、これまで安全対策はメーカーの考え方に任されてきたのが実情だ。しかし、生活支援は時に人命にも関わるリスクが生じる可能性もあり、メーカー側が慎重になりすぎて今後の技術開発や産業化が進みにくいことが懸念された。
そこで、安全性への責任をメーカーが一手に背負うのではなく、標準化機関と安全性認証機関がメーカーとユーザーの間で第三者として安全確認することにより、メーカーに過度なリスクを負わせず、またユーザーにはメーカーが最大限のリスク縮小を行った最後に残る残留リスクだけを納得・了承してもらう仕組みが必要と考えられた。その安全性認証のベースには、国際的な安全規格が望ましい。「生活支援ロボット実用化プロジェクト」を通して研究及び実証された結果をもとに、日本がISOに提案し、その内容が採用されてでき上がったのがISO 13482だ。
現在のところ(注:本稿初出は2014年9月)、第三者機関である日本品質保証機構により、ドラフト版(ISO/DIS 13482)での安全認証が1件、正式版(ISO 13482)での安全認証が2件行われている。まずはこの3件の概要で生活支援ロボットのイメージの一端をつかんでおこう。
- ロボットスーツ「HAL 福祉用」……人間装着型ロボット
2014年2月にドラフト版での安全認証が行われたサイバーダインの製品。ロボットスーツの名のとおり、全身や足腰の運動をサポートする器具を装着し、皮膚からの生体電位信号をもとに、起立、着座、階段の昇降といった生活動作をラクに行うことができる装置だ。下肢に障害をもつ人のリハビリの介助負担を低減するといった用途にも使える。ヨーロッパでは医療器具として認証されている。
- 離床支援のためのロボット介護機器「リショーネ」……移動作業型(操縦中心)ロボット
2014年2月に正式版での世界初の安全認証が行われたパナソニックの製品。ベッドが簡単な操作で車いすに早変わりする「電動ケアベッド兼電動リクライニング車いす」である。自分では離床できない人をベッドから車いすに移動する移乗介助は大変な力仕事だが、これを使えば1人の介助者が簡単操作でスムーズに移乗させることができ、介護対象者にも負担をかけない。
- 配送センタ内高速ビークル管理「エリア管理システム」……移動作業型(自律中心)ロボット
同時に世界初の正式版による安全認証が行われた「エリア管理システム」は、フォークリフトや作業者などが行き来する配送センター内で、自動走行する自走台車(ビークル/無人搬送ロボット)を最高速度200m/分で安全に走行できるようにしたシステムだ。UWB(Ultra Wide Band/超広帯域無線)による位置計測で作業者やフォークリフトの位置をリアルタイムに計測し、ビークルの速度をコントロールして衝突を避けられる。物陰からの作業者の飛び出しなども感知して安全を確保できる。
これらの「人間装着型」「移動作業型(操縦中心/自律中心)」ロボットに加え、電動車いすや屋外用の移動支援機器などの「搭乗型ロボット」も生活支援ロボットのジャンルに入る。
安全性はどのように検証されるのか
ISO 13482の前提になっているのが「リスクアセスメント」の実施だ。100%の安全確保は理想だが、現実にはリスクは無限にあり、全てをなくすのは不可能だ。そこでどこまでのリスク低減が必要なのかを洗い出し、安全要求事項を決めて、リスクを低減するプロセスを決める。そこでは要求事項をクリアしたと認められる評価基準も決め、どのような試験などをして検証するかも決めておく。その決め方についての規定がISO 13482に書かれていると考えればよいだろう。ISO 13482の中に数値などの形で基準値が記されているわけではなく、あくまでメーカーがユーザーに受容してもらえるリスクのレベルを定め、そこまでのリスク低減ができているかどうかを、規格に照らして認証機関が審査することになる。
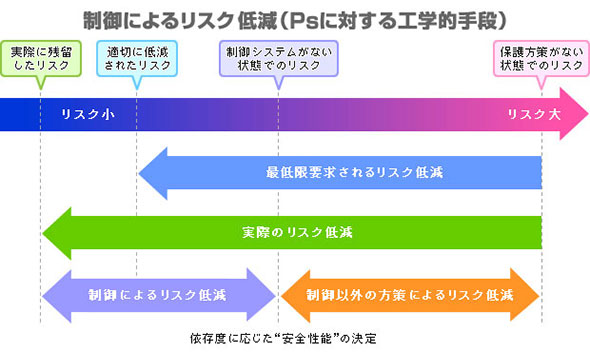
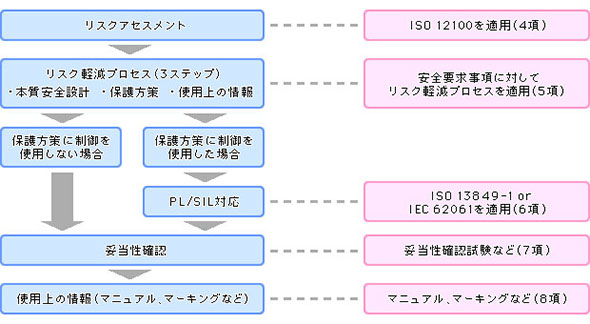
リスクの低減は、いわば「歩道と車道を分ける」というような、制御を必要としない「本質安全」対策を最優先し、その後に機能安全を含む安全防護策(保護方策)を組み込んで「制御」によるリスク低減を図ることになる。さらにユーザーへのマニュアルや警告文書などの形で「使用上の情報」を提供し、残留リスクをできるだけ低減するという流れだ。リスク低減についての基本的な考え方を図1に、ISO 13482の構成概要を図2に掲げる。詳細な内容は生活支援ロボット安全情報センターのWebサイトから入手できるので、参照をお薦めする。
ロボットメーカーが安全認証を得る場合には、まず自社自身で製品の安全性試験を行う必要がある。これには自社内の試験設備ではなく、第三者である安全性試験機関での実施が必要だ。日本では2010年に茨城県つくば市に「生活支援ロボット安全検証センター」が開設されており、後述するように世界でもまれに見るような試験設備が利用できる。同センターを利用して認証に必要な試験を実施し、そのデータを含めた書類を安全性認証機関(日本品質保証機構など)に提出、審査を経て問題なければ安全性認証が行われ、認証マークの使用が許されるという運びになる。そのマークがあれば、ユーザーはその製品を安心して購入・利用できるというわけだ。ただし、用途によって評価基準は違うので、同じ製品であっても介護用は認証されていても家庭用は認証されていないというケースも将来的には出てくるかもしれない。
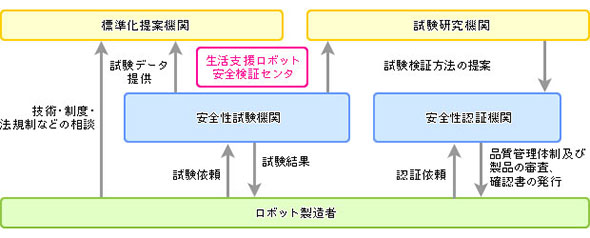
メーカー、安全性認証機関、安全性試験機関、大学などの試験研究機関、標準化提案機関(NEDOなど)の関係を図3に示す。それぞれが責任を分担して、メーカーに過度な負担をかけず、ユーザにはより確実で最小限のリスクだけを受容してもらう仕組みが、日本では既にできていることになる。
安全性検証のための試験設備とは
Copyright © ITmedia, Inc. All Rights Reserved.