2006年大会は“環境への対応力”で悲喜こもごも:ETロボコン2006へと続く道(4)(2/3 ページ)
要素技術の向上、半面で走行戦略は停滞気味
今回のモデリング部門審査で特に目立った傾向は、要素技術の向上が挙げられると萩原裕志氏(審査委員)は指摘した。リアルタイムOSの搭載、マルチスレッド、PID制御、シミュレータによる性能評価など、性能を強く意識したモデルの登場である。中でも「Teamふるかわ」(アルプス電気)のMDD(モデル駆動開発)は、意欲的な取り組みといえるだろう。UMLモデリングツール(Telelogic社製のRhapsody)から自動生成したコードに後から手を加えることはせず、パラメータの調整だけでレースに臨んだ。
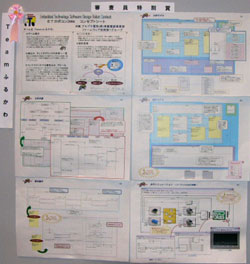 MDDに挑戦して審査員特別賞を受賞した「Teamふるかわ」のモデル図
MDDに挑戦して審査員特別賞を受賞した「Teamふるかわ」のモデル図この方針について、「Teamふるかわ」の佐藤征宏氏は「MDDで本当に速く走れるわけじゃないのは分かっています。自動コード生成にこだわったのは、MDDでどこまでできるかチャレンジしてみたかったから。タイムトライアルは捨て、モデリング部門審査での上位入賞を狙っています」と語っていたが、その言葉どおり審査員特別賞を受賞した。同社の業務でも、より上流工程のスキルが求められているという。「UMLモデリングはメンテナンス性、レビューのしやすさ、海外とのコミュニケーションといったメリットを感じています」(佐藤氏)。
要素技術が向上した半面、走行戦略はオリジナリティが不足していたと、多くの審査委員が口にしていた。前回大会では、スタート直後に自らコース外に進路を取り、強引にショートカットしてコースに復帰するという“ドルフィンジャンプ”と呼ばれる画期的な走行戦略が登場したのだが、今回はこれに匹敵するようなイノベーションは見られなかった。「前回からあった走行戦略を踏襲した現実的なモデルが大半で、意表を突くようなモデルは減ってしまった。100個ものモデルを審査する側としては、もっと冒険してほしかったというのが本音。でないと差別化できない」(渡辺氏)。
サーキットには魔物がすむ
次にタイムトライアル部門の結果を見てみよう。競技は2回の走行タイムからボーナスタイム(ゲート通過、Zクランク、ゴール後停止の各課題成功に対して与えられる)を減算したリザルトタイムで順位が決定される。優勝チームは「O.R.C.」(オリンパスソフトウェアテクノロジー)、第2位は「TEAM-DRAGON」(ソフトウェアコントロール関西支社)、第3位は「QUEST」(ユニテル)という結果だった。
| 順位 | チーム名 | 所属 |
|---|---|---|
| 優勝 | O.R.C. | オリンパスソフトウェアテクノロジー |
| 第2位 | TEAM-DRAGON | ソフトウェアコントロール 関西支社 |
| 第3位 | QUEST | 株式会社ユニテル |
| 審査員特別賞 | アクティブウィング | 富士通ラーニングメディア 西日本ソリューション部 |
| 審査員特別賞 | 田町レーシング | オージス総研 組み込みソリューション部 |
| JASA賞 | なんだいや(仮) | リコーソフトウエア プロダクト事業部 鳥取第三開発C |
レース当日、競技開始に先立って午前中に試走が行われたのだが、そこで参加チームに衝撃が走った。コースの白/黒を判定する光センサーの値が、各チームの想定していたものと大幅に違っていたのだ。昨年までの大会や6月に行われた試走会では、白/黒のセンサー値の差異は10ポイントほどだった。ところが本番コースでは、この際は3ポイントほどしかなく、さらにコースの位置によって白黒判定のしきい値が数ポイント上下するという過酷な環境だった。
実行副委員長の渡辺登氏によれば、当初は会場全体を照明で明るくするはずだったが、これだと白黒値の差異がほとんどなくなってしまった。そこで急きょ、全体の照明を落とし、スポットライトのみの使用に切り替えたという(会場写真を参照)。これで辛うじて白黒値の差異を確保できたが、コース上の照明の明るさにばらつきが出てしまった。
各チームはキャリブレーションの調整に大わらわとなり、多くのチームは実装していた「難所走破アルゴリズム」を封印し、最低限完走できるようプログラムの修正に追われた。優勝したチーム「O.R.C.」でも、午前中の試走では「数十センチも走ればコースアウトする状況」だったそうだ。この過酷な環境に、強豪チームでさえ次々とコースアウトする大波乱のレースとなった。
もっとも、こういった環境変化に対応できるソフトウェアを作るのが組み込み開発の本来の在り方だと語るのは、大会の実行委員長、星光行氏である。「この会場は確かに難しい環境ですが、それでも完走しているチームもあるわけですから、克服できないはずはない。積分を使ったアルゴリズムでセンサー値を動的にキャリブレーションするチームもありました。また、午前中の試走で明らかになった照明に関する問題に対して、どれだけ短時間で対応できるかも、あらかじめ変更に強い設計をしているかで決まってきます」。
おそらく通常の照明環境であれば、事前の試走会の様子から推測して、もっと多くのチームが完走を果たしただろう。また、今回から登場した難所「Zクランク」に挑戦する見せ場も多かったはずだ。そういった意味で、タイムトライアル部門はやや盛り上がりに欠けた感もあった。しかし、予想外に過酷な環境となった今回の大会は、期せずしてETロボコンに新しい課題を突き付けることになった。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- JDIが有機ELディスプレイ「eLEAP」量産へ、輝度1600nitsのノートPC用製品も発表
- FDDからブートできる「MenuetOS」とCPUキャッシュにOSが載る「KolibriOS」
- 教師なし画像分類AIの精度を従来比3倍に、東芝が半導体製造プロセスで実証へ
- 安川電機のAI機能搭載産業用ロボットがウインドリバーの組み込みLinuxを採用
- VIAがMediaTekのIoT向けプロセッサ搭載組み込みソリューションを展開
- DMG森精機子会社がWi-Fi HaLowモジュールに対応したドライバ/ミドルウェアを提供
- SPRESENSE向けのマルチIMUボード、精度はファイバージャイロスコープに匹敵
- Qtが静的解析とアーキテクチャ解析をスイートで提供、ソフトウェアテストを強化
- CANプロトコルを理解するための基礎知識
- CAN通信におけるデータ送信の仕組みとは?
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。