自律化が進む車載システム:安全性をより高めるために(2/4 ページ)
問題なのは「ドライバーの不注意」
ドライバー向けの運転支援/安全システムは、より安全に、簡単に、快適に運転できるというメリットをもたらす。そうしたシステムは、ドライバーに危険を知らせることで事故を回避するように機能する。米Freescale Semiconductor社で戦略ディレクターを務めるPeter Schulmeyer氏は、「現在開発中の、あるいはすでに市場に出回っている車載用電子システムの主な目的は、ドライバーの負荷を減らすことだ」と説明する。
米国警察の発表によると、2004年度の自動車事故件数は約620万件で、死者の数は4万2636人、負傷者数は約280万人に上る。NHTSA(National Highway Traffic Safety Administration:米道路交通安全局)の報告書*1)とVTTI(Virginia Tech Transportation Institute)によれば、ほとんどの事故やニアミスは、ドライバーの不注意が原因で発生している。衝突事故の80%とニアミスの65%がドライバーの不注意によるもので、事故発生前の3秒の間に居眠りをしていたり、携帯電話で通話を行っていたりしたことが判明したという。
従来は、車両衝突事故が発生した際の生存率を上げるために、受動的な安全システムが開発され、それが車両に装備されていた。そうしたシステムの機能としては、以下のようなものが挙げられる。
シートベルトをきつく締めるエアバッグが作動したときに、最も安全な位置まで座席を移動する事故が起こりそうになったときに、窓とサンルーフを閉じる しかしながら、こうした機能が役に立つことは少ない。
一方、上で紹介した報告書は、電子システムによってドライバーの不注意を補える可能性が高いことを示している。実際、最近ではドライバーに警告を発したり、車の走行状況を変更したりすることで、事故を回避するために自律的(能動的)に機能する新しいシステムが注目を集めている(図2)。
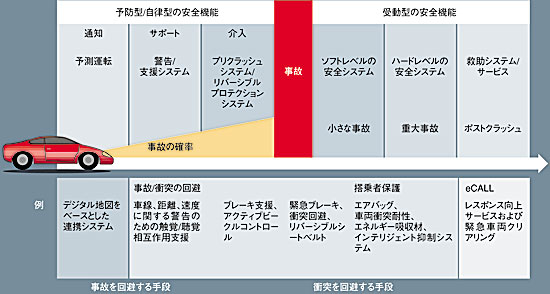 図2 安全性を確保するための機能 危険の重大さとタイミングに応じ、自律型の安全システムはできるだけ早くドライバーに危険を伝える。その情報に対するドライバーの反応がない場合には警告を発し、事故回避のため、あるいは事故発生時の影響を緩和するために能動的に介入する(欧州PReVENT提供)。
図2 安全性を確保するための機能 危険の重大さとタイミングに応じ、自律型の安全システムはできるだけ早くドライバーに危険を伝える。その情報に対するドライバーの反応がない場合には警告を発し、事故回避のため、あるいは事故発生時の影響を緩和するために能動的に介入する(欧州PReVENT提供)。自動車の自律化が進むに従い、ドライバーは車を操作することではなく、車を目的地に向けることに集中できるようになる。例えば、先ほど触れたACC機能は、無線による方位測定と距離の測定を行うレーダーを使って、走行中に安全な車間距離を保つというものである。これにより、ドライバーの負荷をある程度軽減し、不注意になる瞬間を減らすことができる。このシステムは、前方を走る車両の速度が変化したときに、ドライバーよりも速く正確に反応する。
また、ESC(electronic stability control:横滑り防止装置)は、アンチロックブレーキ、トラクション制御、トルク制御の組み合わせにより、ドライバーによる車両制御を支援する。このシステムは、ドライバーが向かおうとしている方向と、車の実際の反応を比較することで動作する。その比較処理は、ハンドルとブレーキセンサーを関連付けることで行われる。その際、センサーは、車の傾きや車輪の回転速度を計測する。ドライバーの命令と車の動作に違いがあると、システムはいずれかの車輪に適切にブレーキをかけ、車の走行経路を修正する。必要に応じてエンジントルクを下げるために、安定性制御システムが車のパワートレインコントローラに接続されているケースもある。
ドライバーの意思の推察
事故を回避するには、事故が発生する数秒前に、システムがその予兆を認識できるようになっていなければならない。安全システムが間違った結論に基づいて予防対策をとることがないようにするには、ドライバーの意思を推察し、その意思と車の動作を関連付ける必要がある。事故の兆候が現れたら、自律的な安全システムは限られた条件内でアクティブになり、車の不安定な動きに対応して機能する。
潜在的な危険を予測/認識してそれを回避するシステムでは、ドライバーの意思をより正確に推察することが重要である。例えば、意味のないタイミングでアラームが鳴ると、ドライバーはそのシステムをオフにしてしまうか、警告を無視してしまうだろう。そうなると、そのシステムの価値は失われてしまう。つまり、システムが有効に使われるには、意味のないケースでアラームが鳴ることがないようにしなければならない。車をまず始動させて、その後すぐにシートベルトを締める習慣を持っているドライバーにとっては、シートベルトを締めずに車が始動すると、必ずアラームが鳴る警告システムにはほとんど価値がない。
死角警報システムにおいても、ドライバーの意思を推察することが重要である。死角に物体があると必ずドライバーに警告するようなものだとしたら、ドライバーはすぐにそのシステムをオフにしてしまうだろう。そうならないためには、ドライバーが車の位置を変えようとしているときに、衝突する可能性が高い物体を検知した場合にのみ、ドライバーに警告するようなシステムでなくてはならない。つまり、単に物体を検知するだけでなく、条件判断を行ったうえでドライバーに通知せねばならない。従って、そのタスクは複雑なものになる。
一般に、方向指示器はドライバーが車線変更しようとするときに使われる。しかし、ドライバーの車線変更の意思をそれだけで判断するのでは不十分だ。車外の環境を検知するセンサーに限らず、ドライバーの意思を推察するセンサーには、複数のポイントからの情報を収集する機能を組み込む必要がある。ハンドル、ブレーキペダル、方向指示器、慣性/加速度測定システムなどがそれらのポイントに当たるが、視覚システムを用いてドライバーのそぶりを情報として取得する手法も考えられる。ドライバーの車線変更の意思を推察する業界標準のアルゴリズムは存在しないので、そのようなアルゴリズムは、自動車サプライヤが独自に研究/開発しなければならないかもしれない。
Copyright © ITmedia, Inc. All Rights Reserved.
オートモーティブの記事ランキング
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。