汎用I/Oを使って、LEDを操ってみよう:S08ではじめるマイコン制御プログラミング(3)(3/3 ページ)
» 2008年11月27日 00時00分 公開
[高田浩,@IT MONOist]
プログラムの修正
それでは、ループの中に時間待ちの処理を入れてみます。
時間待ち処理で使われる変数tを定義する際、必ずvolatile指定子を使ってください。これは最適化を抑制するものです。これを忘れると、コンパイル時にtは未使用ということで処理が取り除かれてしまいます。
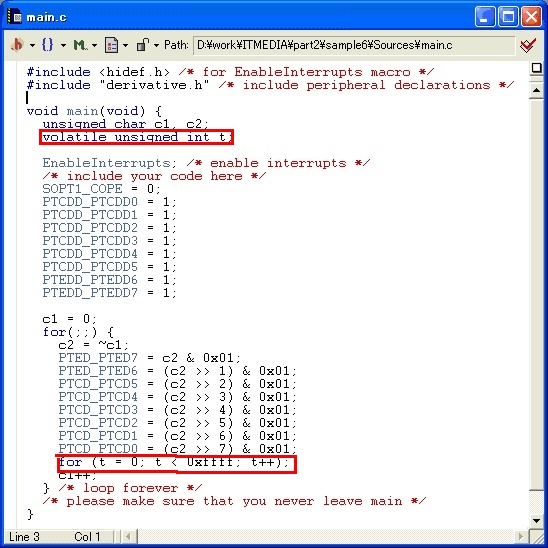 リスト4
リスト4ちょっとmain関数が煩雑になってきました。処理ごとに関数に分けてみましょう(リスト5)。
#include <hidef.h> /* for EnableInterrupts macro */
#include "derivative.h" /* include peripheral declarations */
void mcu_init(void);
void putbyte_led(unsigned char);
void wait(unsigned int);
void main(void) {
unsigned char c;
EnableInterrupts; /* enable interrupts */
/* include your code here */
mcu_init();
c = 0;
for(;;) {
putbyte_led(c);
wait(0xffff);
c++;
} /* loop forever */
/* please make sure that you never leave main */
}
void mcu_init(void){
SOPT1_COPE = 0;
PTCDD_PTCDD0 = 1;
PTCDD_PTCDD1 = 1;
PTCDD_PTCDD2 = 1;
PTCDD_PTCDD3 = 1;
PTCDD_PTCDD4 = 1;
PTCDD_PTCDD5 = 1;
PTEDD_PTEDD6 = 1;
PTEDD_PTEDD7 = 1;
return ;
}
void putbyte_led(unsigned char c){
c = ~c;
PTED_PTED7 = c & 0x01;
PTED_PTED6 = (c >> 1) & 0x01;
PTCD_PTCD5 = (c >> 2) & 0x01;
PTCD_PTCD4 = (c >> 3) & 0x01;
PTCD_PTCD3 = (c >> 4) & 0x01;
PTCD_PTCD2 = (c >> 5) & 0x01;
PTCD_PTCD1 = (c >> 6) & 0x01;
PTCD_PTCD0 = (c >> 7) & 0x01;
return ;
}
void wait(unsigned int time){
volatile unsigned int c;
for (c = 0; c < time; c++) ;
return ;
}
リスト5
また、せっかくスイッチがいくつもありますから、カウンタの制御用に使ってみましょう。PTA2でアップ、PTA3でダウン、PTD2で停止です(リスト6)。
#include <hidef.h> /* for EnableInterrupts macro */
#include "derivative.h" /* include peripheral declarations */
void mcu_init(void);
void putbyte_led(unsigned char);
void wait(unsigned int);
void main(void) {
unsigned char c;
char step;
EnableInterrupts; /* enable interrupts */
/* include your code here */
mcu_init();
c = 0;
step = 0;
for(;;) {
if (!PTAD_PTAD2) {
step = 1;
} else if (!PTAD_PTAD3) {
step = -1;
} else if (!PTDD_PTDD2) {
step = 0;
}
putbyte_led(c);
wait(0xffff);
c += step;
} /* loop forever */
/* please make sure that you never leave main */
}
void mcu_init(void){
SOPT1_COPE = 0;
PTCDD_PTCDD0 = 1;
PTCDD_PTCDD1 = 1;
PTCDD_PTCDD2 = 1;
PTCDD_PTCDD3 = 1;
PTCDD_PTCDD4 = 1;
PTCDD_PTCDD5 = 1;
PTEDD_PTEDD6 = 1;
PTEDD_PTEDD7 = 1;
PTADD_PTADD2 = 0;
PTAPE_PTAPE2 = 1;
PTADD_PTADD3 = 0;
PTAPE_PTAPE3 = 1;
PTDDD_PTDDD2 = 0;
PTDPE_PTDPE2 = 1;
return ;
}
void putbyte_led(unsigned char c){
c = ~c;
PTED_PTED7 = c & 0x01;
PTED_PTED6 = (c >> 1) & 0x01;
PTCD_PTCD5 = (c >> 2) & 0x01;
PTCD_PTCD4 = (c >> 3) & 0x01;
PTCD_PTCD3 = (c >> 4) & 0x01;
PTCD_PTCD2 = (c >> 5) & 0x01;
PTCD_PTCD1 = (c >> 6) & 0x01;
PTCD_PTCD0 = (c >> 7) & 0x01;
return ;
}
void wait(unsigned int time){
volatile unsigned int c;
for (c = 0; c < time; c++) ;
return ;
}
リスト6
どうですか? これまでの実習でデモ・ボードのハードウェアを変更することなくソフトウェアの変更だけでいろいろな機能が実現できたことに着目してください。余裕のある人は、LEDのカウンタの速度を変えたり、点滅パターンを変えたりしてみるなど、いろいろ試してGPIOの操作に慣れてください。
いかがでしたか。いろいろ試したような気がしますが、今回も基本のGPIOだけ使ってLEDを制御しました。次回は、制御に時間の概念を入れてみます。マイコン制御プログラムの世界がさらに広がりますよ。第4回をお楽しみに!(次回に続く)
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- ソニーのLPWA「ELTRES」の通信モジュールが機能追加、システムの簡素化が可能に
- CANプロトコルを理解するための基礎知識
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- 【問題7】10進数を2進数に変換するプログラム
- テスト消化曲線とバグ発生曲線の7パターン診断
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 6Gに向けたサブテラヘルツ帯対応無線デバイス、100Gbpsの超高速伝送を実証
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。