LEDの制御に時間の概念を取り入れる:S08ではじめるマイコン制御プログラミング(4)(3/3 ページ)
ハードウェア・タイマー
わざわざ、「ソフトウェア」タイマーというのですから、それならば「ハードウェア」タイマーもあるのではないかと考えた人。鋭いです。世の中の仕組みが良く分かった人ですね。
実はQE128マイコンにもハードウェア・タイマーがあります。タイマーといっても時計ではありませんよ。正確な周期で数を数える、多機能なカウンタです。QE128マイコンでは8ビットのRTCと16ビットのTPMが搭載されています。今回は比較的使い方が簡単なRTCを用います。
では、0.5秒毎にLEDの表示を更新するようにしましょう。リファレンス・マニュアルでRTC(Real-Time Counter)の章を見てみます。今回用いるのはRTCSCレジスタだけです(図3)。
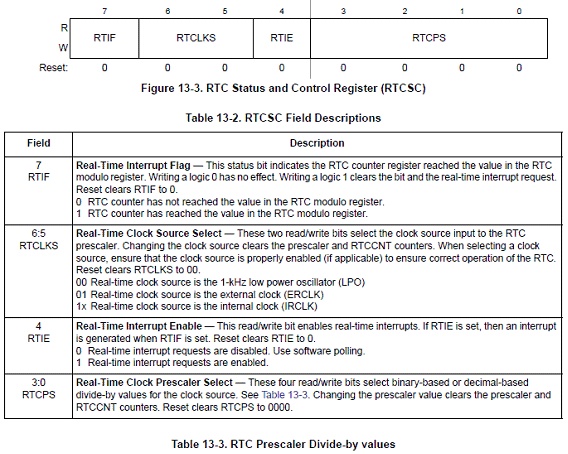 図3 RTCの設定
図3 RTCの設定RTCを使う前にRTCLKSとRTCPSの値を決めます。リファレンス・マニュアルに対応表(図4)が出ていますので、これを使うと便利です。0.5秒になる組み合わせを探せばいいのです。今回はRTCLKS=00b、RTCPS=1110bの組み合わせを使います。RTIEを1にすれば、割り込み許可になり、0.5秒毎にRTC割り込みがかかるようになります。
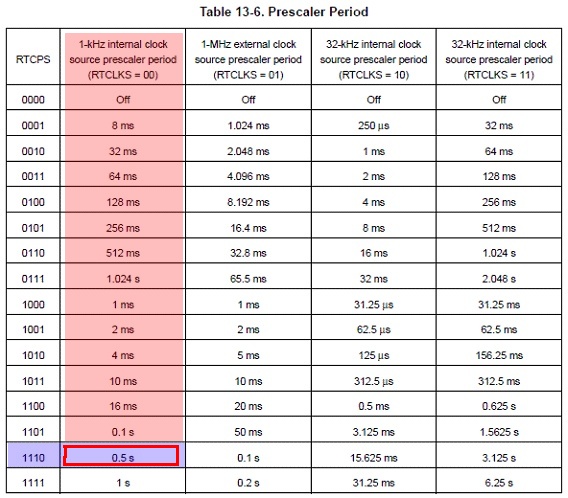 図4 プリスケーラーの設定
図4 プリスケーラーの設定プログラムを見てみます。main関数では、LED表示部分も割り込み処理で行い、周辺I/Fや変数の初期化を行うだけになっています。カウンタ変数cも外部変数とし、割り込み処理内で操作できるようにしました。これまで使っていたソフトウェア・タイマーのwait関数も不要ですので取り除きます(リスト5)。
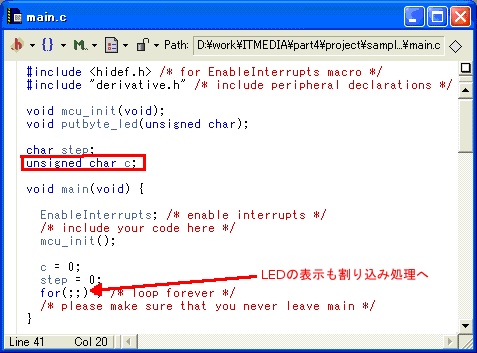 リスト5
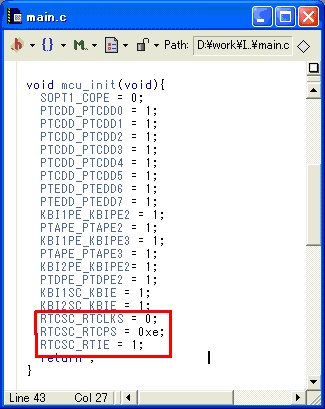
リスト5mcu_init関数にRTC初期化の設定を追加します。RTCSC_RTIEで割り込みが開始され、0.5秒毎にRTC割り込みがかかることになります(リスト6)。
 リスト6
リスト60.5秒間隔で呼び出されるRTC割り込み処理int_timer関数を定義します。RTC割り込みのベクター・テーブルエントリー番号は24で、定義名は「VectorNumber_Vrtc」です。最初にRTIFに1を書き込み、ビット・クリアをしたあと、これまでmain関数で行っていたLED表示の更新をします。
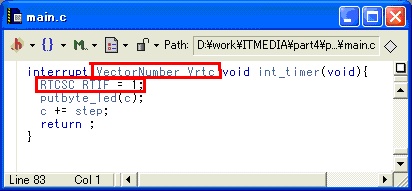 リスト7
リスト7プログラムをビルド、デモボードにダウンロードして動作を確認してみてください。きちんと0.5秒間隔でLEDが更新します。多少、早くまたは遅く見えるかもしれませんが気のせいです……。
すいません、白状します。実は今回RTCのクロック・ソースに使った1kHzのLPOはあまり精度がよくありません。条件によりますが、最大±30%程度の周期の誤差があります。ただ、使い方が簡単なので今回はこれで説明しました。精度が必要であれば、トリミングという処理がされたIRCLKを使うか、外部クロックERCLKを使うと精度を上げることが可能です。余裕があるようでしたら、リファレンス・マニュアルで調べてみてください。
いかがでしたか? 今回説明した割り込みとタイマーの考え方は、制御プログラムではよく使われるものです。LEDのアップ/ダウン・カウンタのプログラムも、前回で作ったものと機能は変わりませんが、中身がだいぶアップグレードされてきたと実感してきているのではないでしょうか? 念のため、今回の最終版プログラムの全ソースリストを示します(リスト8)。
#include <hidef.h> /* for EnableInterrupts macro */
#include "derivative.h" /* include peripheral declarations */
void mcu_init(void);
void putbyte_led(unsigned char);
char step;
unsigned char c;
void main(void) {
EnableInterrupts; /* enable interrupts */
/* include your code here */
mcu_init();
c = 0;
step = 0;
for(;;) ; /* loop forever */
/* please make sure that you never leave main */
}
void mcu_init(void){
SOPT1_COPE = 0;
PTCDD_PTCDD0 = 1;
PTCDD_PTCDD1 = 1;
PTCDD_PTCDD2 = 1;
PTCDD_PTCDD3 = 1;
PTCDD_PTCDD4 = 1;
PTCDD_PTCDD5 = 1;
PTEDD_PTEDD6 = 1;
PTEDD_PTEDD7 = 1;
KBI1PE_KBIPE2 = 1;
PTAPE_PTAPE2 = 1;
KBI1PE_KBIPE3 = 1;
PTAPE_PTAPE3 = 1;
KBI2PE_KBIPE2= 1;
PTDPE_PTDPE2 = 1;
KBI1SC_KBIE = 1;
KBI2SC_KBIE = 1;
RTCSC_RTCLKS = 0;
RTCSC_RTCPS = 0xe;
RTCSC_RTIE = 1;
return ;
}
void putbyte_led(unsigned char c){
c = ~c;
PTED_PTED7 = c & 0x01;
PTED_PTED6 = (c >> 1) & 0x01;
PTCD_PTCD5 = (c >> 2) & 0x01;
PTCD_PTCD4 = (c >> 3) & 0x01;
PTCD_PTCD3 = (c >> 4) & 0x01;
PTCD_PTCD2 = (c >> 5) & 0x01;
PTCD_PTCD1 = (c >> 6) & 0x01;
PTCD_PTCD0 = (c >> 7) & 0x01;
return ;
}
interrupt VectorNumber_Vkeyboard void chk_key_stat(void){
if (KBI1SC_KBF) {
KBI1SC_KBACK = 1;
if (!PTAD_PTAD2) {
step = 1;
} else if (!PTAD_PTAD3) {
step = -1;
}
}
if (KBI2SC_KBF) {
KBI2SC_KBACK = 1;
if (!PTDD_PTDD2) {
step = 0;
}
}
return ;
}
interrupt VectorNumber_Vrtc void int_timer(void){
RTCSC_RTIF = 1;
putbyte_led(c);
c += step;
return ;
}
次回はいよいよアナログ・データを扱いますよ。第5回をお楽しみに!(次回に続く)
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- CAN通信におけるデータ送信の仕組みとは?
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- 景気減速でソフト開発の脆弱性対応が後手に? SBOM整備の取り組みも足踏みか
- CANプロトコルを理解するための基礎知識
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。