Cで行う二輪倒立振子とライントレースの制御:ETロボコン2009、挑戦記(3)(1/2 ページ)
前回に引き続き、ETロボコン事務局から提供されているプログラムを実行。うまく行けば倒立振子とライントレースを行います。
前回予告したとおり、今回はETロボコン事務局から配布されている二輪倒立振子のサンプルプログラムを実行してみたいと思います。サンプルプログラムは、ジャイロセンサと光センサを使用して、バランスを取りながら黒線上をライントレースするというものです(スタートスイッチにはタッチセンサを使用します)。
まずは下準備として、センサやモータと本体をつなぐ各ポートの配線を行います。 NXTには3つの入力ポート(A〜C)と4つの出力ポート(1〜4)が用意されていますので(画像1を参照してください)、今回はジャイロセンサと光センサ、タッチセンサを入力ポートに、左右のモータを出力ポートに配線しました。
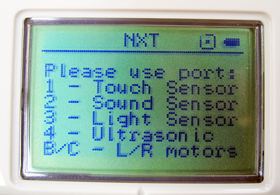
 画像1 NXTに用意されているI/Oポート
画像1 NXTに用意されているI/Oポート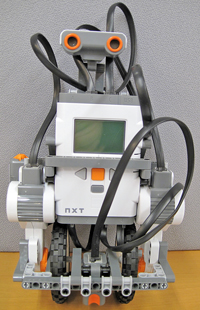 画像2 配線後のNXT
画像2 配線後のNXT配線が完了し、これで準備OKです(ETロボコンキットで用意されいてるコードを使用したのですが、長さの調整を行わなかったために少々不格好な状態になってしまいました)。
前回と同じ手順で、サンプルプログラムをビルドし、NXTに転送します。
ETロボコン事務局から提供されているコメントによると、プログラム実行後にタッチセンサを押すと、ライントレースを開始するようです。早速実行してみます。
 画像3 実行手順 NXTを起動 → プログラムからsample.cを選択 → 実行(Run)
画像3 実行手順 NXTを起動 → プログラムからsample.cを選択 → 実行(Run)……。
すると、おかしなことにNXTがまったく動きません……。LEDが点灯しているようなのでプログラムはうまく実行されているようなのですが、何か問題があるようです。
そこでサンプルプログラムのソースコードをもう一度よく見直すと、どうやらジャイロセンサと光センサの値を環境に合わせて変える必要がありそうです。ここでいう環境とは、加速度0のときのジャイロセンサのオフセット値、黒いライン上を走行しているときに光センサの値、ラインを外れたときの光センサの値の3点です。
 サンプルプログラムで設定されているパラメータ値
サンプルプログラムで設定されているパラメータ値 現在の環境に合わせた各センサ値を知るには、また別のプログラムを作るか、サンプルプログラムに、追加する必要がありそうです……と、そんなことを考えていると、ちょうど同じ疑問を持っていた参加者の方からETロボコンのメーリングリスト(参加者のみ閲覧可能なメーリングリスト)に、その解決策が含まれた情報が提供されていました。
そのメールによると、どうやら前回実行したhelloworldプログラムが、さきほどのセンサ値を表示するプログラムのようです。前回は配線をしていなかったので、数値は表示されていませんでしたが、配線後にあらためて実行すると、ジャイロセンサの値・光センサの値と、まさに欲しかった情報(各センサの値)を確認することができます。
実行してみました。
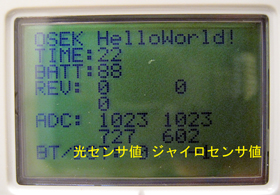
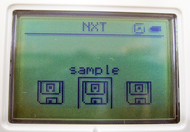
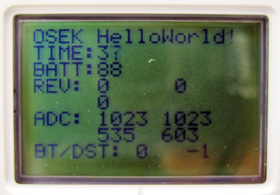 画像4 配線後にhelloworldプログラムを実行した様子
画像4 配線後にhelloworldプログラムを実行した様子 表示されたセンサ値によると、ジャイロセンサの値が約600、黒いライン上のときのセンサ値が約730、ラインを外れたときのセンサ値が約540でした。この値を参考に、サンプルプログラムを書き換え、再度実行してみます。
すると……!
サンプルプログラム実行の様子
今後こそNXTが動きました。ライントレースも順調に行っています。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CANプロトコルを理解するための基礎知識
- ソニーのLPWA「ELTRES」の通信モジュールが機能追加、システムの簡素化が可能に
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- 【問題7】10進数を2進数に変換するプログラム
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- テスト消化曲線とバグ発生曲線の7パターン診断
- 6Gに向けたサブテラヘルツ帯対応無線デバイス、100Gbpsの超高速伝送を実証
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。