ETロボコン、今年の統括と来年度へ向けた必勝法:ETロボコン2009、挑戦記(10)
PID制御はもはやモデルに記載するまでもない? 大幅なコース変更が予想される来年度に向けて、今年登場した要素技術をおさらいしよう。
ETロボコン2009 チャンピオンシップ大会の後半では、本部技術員の近政 隆氏と関西地区技術員の水野 昇幸氏から、性能面(制御技術審査)での今年のトレンドと、実際に競技会(走行)を見ての所感が述べられた。
1年目から王道と呼べる手法が登場したNXT
「今年で見納めとなった走行体RCX(LEGO Mindstorms RCX)は、UMLロボコン時代から構築されてきた光センサの補正/電圧対応/灰色検知などの技術が活用され、難所についても新しい走法が各チームから考案されていた」(水野氏)
 パネルディスカッション後に行われたモデル観戦ツアーの様子
パネルディスカッション後に行われたモデル観戦ツアーの様子「新走行体のNXT(LEGO Mindstorms NXT)については、RCXで培われたPID制御や灰色検知などの基礎技術が適切に活用され、さらに新技術として、今年のコースを攻略するには十分過ぎるほどの検討(距離、向き、角度判定など)がなされていた」(水野氏)
水野氏は、上記のように今年の性能面での傾向をスライドで振り返りながら「NXTは、ある意味1年目で王道とも呼べる手法が確立されてしまった。RCX時代の累積技術とNXTの新技術を合わせれば、(今年のコースでは)もはや難所とは呼べないものもある」と述べ、中でも「ゴール後停止については攻略方法をモデルに記載しているチームすら少なかった」と明かした。
性能にかかわる要素技術〜NXT走行体〜
続いて近政氏からは、下記6項目の要素技術を基にしたチャンピオンシップ大会出場チーム(NXT走行体、計32チーム)の分析結果が紹介された。
走行制御
32チーム中10チームが、倒立振子制御の性能を向上させていた(ただしモデルに未記入でも走行を見る限り性能アップを図っているチームもいる)。その一例として、近政氏はHELIOS(アドヴィックス)のモデルを紹介。同チームは倒立振子ライブラリに独自の制御を追加することで、性能を引き出していたという。ただしこの手法については「技術的に難易度が高いため、すべてのチームが行うには無理がある。そうでないやり方もある」とし、パラメータチューニングやバランスコントロール(balance_controlのfoward引数に100以上の値を入力する方法)を紹介した。
旋回制御
ライントレース中のPID/PD制御は、32チーム中27チームが採用していた。残り5チームについても、競技会での走行を見ると、もはやモデルに書くまでもないというスタンスが感じ取れたという。「PID/PD制御については、もはや事実上の標準だった」と近政氏。そのほか近政氏は面白い表現として、ライントレースだけでなく角度制御にもPID制御を採用したチームやパラメータ可変にPID/PD制御を行っていたチームを紹介した。
「パラメータ可変のPID/PD制御については、ひものエンベダーズ(沼津工業高等専門学校)、HELIOS(アドヴィックス)、とーんこっつ(アイシン・コムクルーズ)、BAMBOO(富士通コンピュータテクノロジーズ)、KnowledgeACT(富士通ラーニングメディア)が行っていたが、彼らのモデルを見ていると、パラメータ、コースのシナリオや旋回の角度、速度に合わせて、チューニングを可変にしている。パラメータのゲインスケジューリングといわれるが、ここまで詰めなきゃいけないのかというのが分かる」(近政氏)
なお、ETロボコンにおいてPID制御はPとDのパラメータのみで良いという説があるが(本連載でも過去に何度か紹介してきた)、それについてロボコンやらないか(個人チーム)が、非常に説得力のある論理的な説明を記載していたとして、下記のモデルが紹介された。
 ロボコンやらないかのモデル
ロボコンやらないかのモデル 角度を制御する場合、角度はエンコーダの絶対値があるため、I成分がないと微妙なずれが残ってしまう。それをI制御で補正する、という角度制御まで入れる場合にはPIDすべてのパラメータが必要だという
ライン検出
ノイズ除去には、信号処理のローパスフィルタを使用しているチームがいた。「ひものエンベダーズ(沼津工業高等専門学校)はデジタルのIRフィルタを、ちーくま(鹿児島大学)は伝達関数から位置状況をフィルタを作り、離散化するという非常に信号処理の王道的な考え方を取り入れていた」(近政氏)。
また、HASH UFO(日立製作所)は、光センサの外乱対策に東京地区のまいまい(個人チーム)が開発した「まいまい式」を採用。まいまい式について近政氏は、「実際に試してみたが、効果は絶大。直射日光を浴びようが浴びまいが、ライントレースを非常にきれいにできる」と紹介した。なお、まいまい式の原理はこちらでこちらで公開されている(まいまいさんのブログより)。
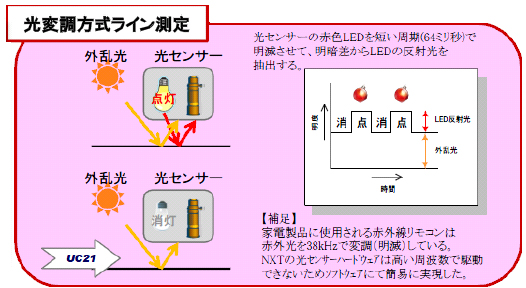 まいまい式の原理
まいまい式の原理モータエンコーダの活用
NXTのモータエンコーダを起用していたチームは32チーム中30チーム。その内、距離/向き/位置推定だけに使用したというのが17チーム、加えてブラインド走行の目標軌跡や速度設定にも対象のデータとして使用したのが13チームいた。
「RCXで行っていたマーカー検知を、NXTでは3分の2のチームが行っていない。モータエンコーダを使用した位置推定を行っている。これは走行体がNXTに変わった最大の特徴だといえる。モータエンコーダを用いると、ズレをどうやって補正するかが難しいところだが、各チーム工夫を凝らしていた」(近政氏)
そのほか速度設定について、パラメータをとことんチューニングしたというBAMBOOの職人走行(同チームが命名)が紹介された。走行1位のBAMBOOは、モデルを見ただけで徹底的に走りこんでいることが読み取れたという。

検証環境
検証環境については、Blutoothを用いたロギングデータ検証が、最も多く行われていた。「いわゆるグラフィカルな表示をしているレベルから、リアルタイムでパラメータをチューニングする技術、さらにはデータを取ってきて、それを再生して何回も検証しているチームもいた」(近政氏)
コース戦略
コース戦略では、ドルフィンジャンプ(コース内をショートカットする走行)をやると宣言していたチームが32チーム中、14チーム。ただしモデルに記述なしでも、モータエンコーダを活用チームは技術的に対応可能だったという。
まとめ:ETロボコン2009、NXT走行体での必勝法
最後に近政氏は、2009年度のETロボコンにおける必勝法として、これまで紹介してきた要素技術を以下のようにまとめた。
「まずは、とにかく倒立振子制御をチューニングし、モータの性能を限界付近で、かつ高速に安定させなければならない。旋回は、ライントレース、角度制御の両方ともPIDでかつ最適な可変ゲインを制御する。光センサ外乱対策としては、『まいまい式』のようなイノベーションを用い、ノイズは信号処理フィルタを使って、ノイズを除去する。さらに、モータエンコーダによって走行体の距離/向き/位置を推定し、要所で誤差補正をしながら、目標とする速度でのブラインド走行と、スムーズなライントレース走行を両立させる」(近政氏)
「検証環境としては、独自のBluetooth通信ロギングデータ検証、パラメータ適合ツールを駆使し、実寸代コースを作り、その上で走行最適化を効率よく実現する。これらがすべて成り立った上で、コース戦略はラインをどれだけ無視できるかが鍵となる。最短距離でIN/OUT、ボーナスを仁義なく取り合う。これが今年のNXT走行体における皆さんの結果を統合したものとなる」(近政氏)
2010年から新参加の方は、これらの項目を抑えておく必要がありそうだ。
2月初旬に行われた記者説明会を皮切りに、これまで計10回に渡ってお伝えしてきた「ETロボコン2009、挑戦記」。自らも参加側に回ることで、他チームの方々の取り組みやスタッフの熱意を、より間近に感じることができた。来年はコースが大幅に変更され、より高度な制御戦略が登場しそうだ。来年リベンジする方も、初挑戦する方も、今年優勝したサヌックの言葉にあるように、ぜひ楽しみながら参加してほしい。
関連記事
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。