ラプラス変換と複素数が導く! +Dのご利益:独学! 機械設計者のための自動制御入門(8)(1/4 ページ)
横風を受けて車がずれても元の位置に戻る仕組みはできた感じだけど、まだ何か足りない。PI制御の不足を補うのは?
当連載の登場人物

銀二(ぎんじ)
設計コンサルタント。甥(おい)っ子の草太を自分の息子のようにかわいがっています。

草太(そうた)
銀二の甥。現在は大学院生です。ちょっと困るとすぐ叔父を頼ってしまうちゃっかり者だけど、頑張り屋さんです。
編集部注* 本記事はフィクションです。実在の人物団体などとは一切関係ありません。
前回は、第1回から主要なテーマとして取り上げてきた、車の自動走行の制御設計を例に挙げて静特性改善のための補償設計についての学習を仕上げました。つまり、横風を受けて曲がる自動車をセンターラインに沿って真っすぐ運転させるためにはどうすればよいかという問題です。
シミュレーションによる動画1から、比例制御(P制御)では、横風を受けると、車がセンターラインからずれるのが分かりましたね。それに対して、積分補償(I補償)を加えてPI制御とした動画2では、横風を受けて車がずれても元の位置に戻ろうとしていました。しかし、思ったほど改善されているとは思えません。何かが足りない気がします。
今回は、動画2における問題点を探りながら、動特性改善について説明します。
P制御だけだと、防風壁で守られないところでは、直接横風を受けるため、車がセンターラインを外れるのが動画1からよく分かる。一方、PI制御の動画2では、横風から車を守っている防風壁がなくなると、直接横風を受けて車がセンターラインから外れるけど、徐々に、センターラインに戻ろうとするのが分かる。だけど……
だけど、何?

2つ、変に感じるところがある……
2つ?
動画1のP制御では、横風をまともに受けるところを過ぎて、防風壁で守られているところに入ると、車はまたセンターラインに戻るよね。だけど動画2のPI制御では、センターラインを超えて車は防風壁に当たってしまう。シミュレーションだからいいものの、本当の車だったら事故になってるよ。これが1つ目
2つ目は?
防風壁がなくなって、直接横風を受けると車がセンターラインから外れ、徐々に、センターラインに戻ろうとするけど、戻り方がずいぶん遅い気がするなぁ

なるほど、そうやなぁ……そうなる原因はなんだと思う?
なんだろうね。2つ目の場合は、直感的に、車の反応が鈍いことが原因のような気がするけど
そう、確かに車の反応が鈍いのが原因だな。では1つ目の原因は?
よく分からない……

そうか、よく分からないか……じゃあ、まず、2つ目の問題、つまり、車が横風を受けてセンターラインから外れ元に戻ろうとするけど、戻り方が遅い、という問題の原因と解決方法について考えてみよう。自動走行制御システムの基本式は……
センタラインが、直線だとすれば、入力xは常に0だから……
ところで、入力xが常に0ならば、図1のブロック線図にあえてxを入れる必要はないやろ? その場合、ブロック線図はどうなる?
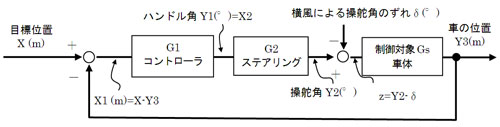 図1 横風を受けるときの自動走行制御システム
図1 横風を受けるときの自動走行制御システム コントローラG1の入力は車の位置Y3に『−』符号が付いたものになるよね。この『−』は、G1の前でなくても、G2の後に持ってきても同じだよね。だったら、車の操舵角Y2を制御したい量とするフィードバック制御システムと考えて、図2のように書き換えることができると思うんだ。でも、目標入力δが負だからフィードバックになっていないよね
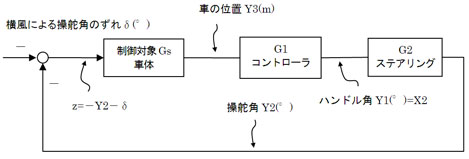 図2 横風を受けるときの自動走行制御システムの構成
図2 横風を受けるときの自動走行制御システムの構成 図1のδは、横風という『外乱』による操舵(そうだ)角のずれや。強風によって、車の直進方向に対して右方向にハンドルがδ度回ることを意味している。このとき車が左からの風に流されないようにするためには、タイヤを左にδ回転させる必要があるやろ? だから……
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- Formlabsが新型3Dプリンタ「Form 4」発表、LFSを超えるプリントエンジンを採用
- 有限要素法入門 〜連立方程式の解法、変位の計算〜
- 3σと不良品発生の確率を予測する「標準正規分布表」
- ムダのない作業と楽しさをもたらす“ありそうでなかった発想”
- 知らないと取り返しがつかなくなる金型の費用と作製期間の話
- SUBARUが深層学習によるAI構築ツールを導入、プレス領域の成形解析工数の削減へ
- 幾何公差の基準「データム」を理解しよう
- フローで考える流れのモデリング(その2) 〜適用例と3D/1Dの関係〜
- 計算時間が従来比最大1000倍高速な流体解析ベースのトポロジー最適化ソフト
- 「設計者はなぜCAEを煙たがるのか」を考察し、広がりを阻害する壁を取り除く
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。