人間型ロボットPALROがソフト基盤オープン化で目指すもの:テクノロジー最前線(3)(2/2 ページ)
Atomプロセッサでロボットを全面制御
 画像4 富士ソフト ロボット事業推進部 ビジネス推進室長の本田 英二氏
画像4 富士ソフト ロボット事業推進部 ビジネス推進室長の本田 英二氏 PALROの最大の特徴は前述したとおり、オープンアーキテクチャを採用している点である。ロボット事業推進部 ビジネス推進室長の本田 英二氏はこう話す。「PALROの企画段階から、さまざまな研究機関や教育機関からは『一緒にロボット技術の研究開発をやりたい』といわれていた。またPALROでは、クラウドコンピューティングのフロントエンド端末として、社会のさまざまなシーンで活用してもらうことを目指している。各種研究機関をはじめ、顧客企業と協業したり、外部デベロッパーの参入を促すためには、オープンアーキテクチャが必須だった」。
 画像5 富士ソフト ロボット事業推進部 ビジネス推進室次長の武居 伸一氏
画像5 富士ソフト ロボット事業推進部 ビジネス推進室次長の武居 伸一氏 ハードウェアプラットフォームの核としてPALROの制御を全面的に担うプロセッサには、インテル「Atom Z530 1.6GHz」を採用する。ロボット事業推進部 ビジネス推進室次長の武居 伸一氏は「PALROは多くの機能をソフトウェア処理しているため、高いプロセッサ性能が必要であり、PC並みのネットワーク機能も求めていたことから、インテルプロセッサに決めた」と話す。そのAtom Z530を搭載するマザーボード・ドーターボードはPC/AT互換の市販品を使う。「秋葉原で買えるような標準部品を極力使うことでコストを抑える」という考えなのだ(電源ボードやセンサボード、コネクターボードはカスタム製作)。
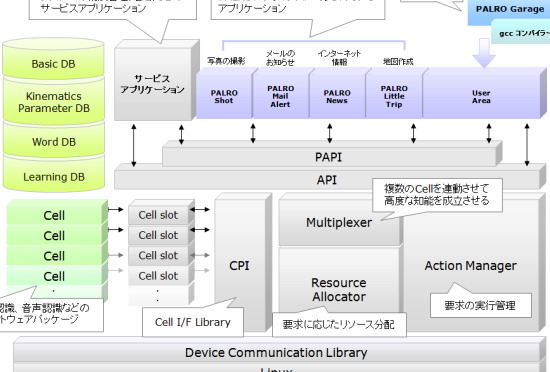 図2 PALRO向けソフトウェアプラットフォーム「Sapie」の構造
図2 PALRO向けソフトウェアプラットフォーム「Sapie」の構造 一方、Atom上で動作するソフトウェアプラットフォームが「Sapie(サピエ)」である。OSにはUbuntu Linux、ミドルウェアには産業技術総合研究所が開発し、オープンソース配布する「OpenRTM-aist」と互換性をもった富士ソフトオリジナルのミドルウェアを開発した。OpenRTM-aistでは、OMG(Object Management Group)が策定したインターフェイス仕様「OMG RTC(Robot Technology Component)」に対応しながら、ロボットの機能要素を1つ1つコンポーネント化して実装・実行する。PALROの場合、各神経部品がコンポーネント単位となり、「Sapie Cell」という名称でSapie上に実装されている。このSapie Cellを改良したり、種類を増やすことにより、ハードウェアが許す範囲でなら機能をソフトウェアで拡張できる。
知能化技術を磨き、用途を開拓するプラットフォーム
さらに富士ソフトは、Sapieをオープンプラットフォームと位置付け、外部デベロッパーとの連携を進めるコミュニティサイト「PALRO Garden」を立ち上げている。「個別の協業やコミュニティ活動を通じて、知能化技術と社会用途性の両面でPALROの価値を高めていく」(本田氏)のが狙いだ。知能化技術とはすなわち神経部品(Sapie Cell)であり、社会用途性とはPALROアプリケーションである。
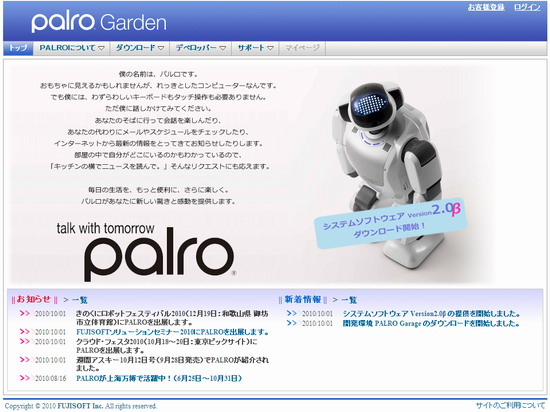 画像6 外部デベロッパーとの連携を進めるコミュニティサイト「PALRO Garden」
画像6 外部デベロッパーとの連携を進めるコミュニティサイト「PALRO Garden」 知能化技術の開発に向けては、開発環境としてプログラミングインターフェイスをPALRO Gardenを介して無償提供している。これを利用するとデベロッパーは、自身が開発した知能化ロジックをSapie Cellとしてラッピングし、PALRO上で機能検証が行える。武居氏は「知能化技術を実機ベースで開発検証しようと思うと、通常は相当なコストが掛かるが、PALROなら、1人1人の開発者や研究者が開発検証環境を持てる」とメリットを話す。
富士ソフトとしては、こうして外部で開発された知能化技術の中で優れたものは神経部品としてPALROに標準採用し、その知能をより高めていく計画だ。また今後は、インテルプロセッサと汎用OSによるPCベースのロボットあるいはロボット技術を取り込んだ組み込みシステムが増えてくるのは確実である。デベロッパー側としても、PALROに合わせて開発した知能化技術は再利用が見込めるはずだ。
一方、アプリケーション開発に向けては、APIと開発環境をPALRO Gardenで無償公開している。PALROアプリケーションは、APIを介してSapie Cellとやりとりし、目的のサービスを実現する。デベロッパーは、複雑なロボット制御ロジックを意識することなく、容易にアプリケーションを作成できるのだ。また、開発環境としても、クラスライブラリやコンパイラ(gcc)、モーション作成ツールなどが提供され、開発言語もC++である。これならロボット分野に縁がなかった一般的なアプリケーション開発者でも十分にこなせるだろう。
PALRO Garden上には実際、富士ソフト自身が内製したものと、外部のデベロッパーが開発したPALROアプリケーションがすでに30本以上登録され、ユーザーは自由にPALROへダウンロード、インストールできる。いわばPALRO版“AppStore”である。現状は、試験的なアプリケーションが多い印象だが、料理レシピを音声でアドバイスする「Cooking Navi」、移動しながら撮影した画像を指定アドレスへメール送信する「監視アプリ」、人の流れを感知して能動的にあいさつを行う「PALRO Greeting」など、幅広い適用シーンが見えてくる。
本田氏は「価格的にコンシューマへ浸透させるにはもう少し時間がかかるが、BtoBの世界では、無人の受付に置いてあいさつとセキュリティ監視を兼ねさせたいとか、企業向けクラウドサービスと連携して秘書的な役割をさせたいとかすでに多くの引き合いがある。今後も、同じ情報端末としても、PCやスマートフォンとは違う、ヒューマノイドロボットらしい社会用途を開拓していきたい」と話す。
 画像7 「ヒューマノイドロボットらしい社会用途を開拓していきたい」と話す本田氏(中央)
画像7 「ヒューマノイドロボットらしい社会用途を開拓していきたい」と話す本田氏(中央) スマートフォンをはじめとする携帯情報端末の世界は、iPhoneとAndroidという2つのプラットフォームの出現により隆盛を見せているが、富士ソフトはPALROにより、そのイノベーションをロボットの世界にいち早く持ち込んだといえよう。今後の動向が注目される。

ロボット/ロボット開発 コーナー

Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CAN通信におけるデータ送信の仕組みとは?
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CANプロトコルを理解するための基礎知識
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。