光れ、LED!! それがマイクロマウスの第一歩:マイクロマウスで始める組み込み開発入門(3)(2/4 ページ)
ここまで、本当にお疲れさまでした。電子工作初心者のえみちゃんには、かなりハードルが高かったと思います。よく頑張りました!
組み立て作業は、はんだ付けに比べてカンタンですから、さくさくと進めましょう!(画像3)
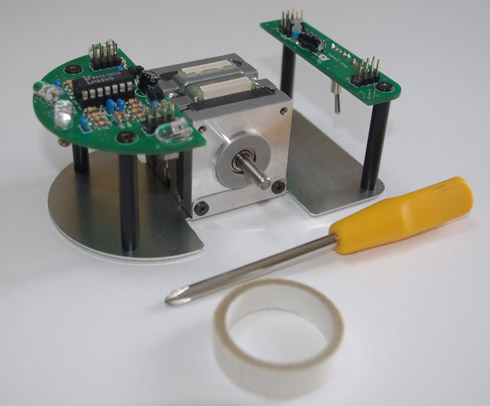
 画像3 はんだ付けした基板と本体部品
画像3 はんだ付けした基板と本体部品シャシーに4本の支柱をネジ止めし、センサー基板と電源基板を載せます。シャシーの真ん中には、ステッピングモータを配置します。このとき、コネクタの向きをそろえてモータ同士を両面テープで背中合わせに張り付けておきます(画像4)。
 画像4 プラスドライバー(NO.1)で組み立てる。左右のモータを両面テープで張るのを忘れずに!
画像4 プラスドライバー(NO.1)で組み立てる。左右のモータを両面テープで張るのを忘れずに!次に、モータの両端にホイールを取り付けます。その際、軸の先端とホイール穴の先端が一致するように調整し、六角レンチでイモネジを締めて固定します(画像5)。
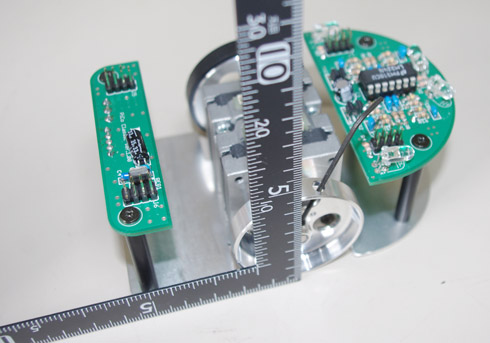 画像5 六角レンチ(1.5mm)を使って、ホイールを固定する。先端の位置をきっちりと合わせよう
画像5 六角レンチ(1.5mm)を使って、ホイールを固定する。先端の位置をきっちりと合わせようそして、モータとメイン基板をケーブルで接続します。ケーブルは前述のように左右があるので、取り違えないように注意しましょう。基板に黒ケーブルが2本並んで隣り合うように挿せば間違いありません(画像6)。
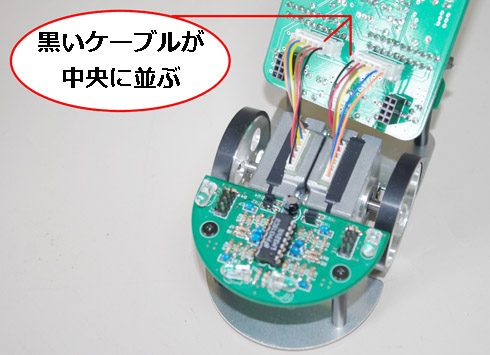 画像6 ケーブルで接続する。右モータにストレートケーブル、左モータがクロスケーブルになる。基板に黒・黒とケーブルが並べばOK
画像6 ケーブルで接続する。右モータにストレートケーブル、左モータがクロスケーブルになる。基板に黒・黒とケーブルが並べばOK次に、シャシーのネジがコースを擦らないようにするため、テフロンシートを張ります。テフロンシートは前方用(10×40mm)を1枚、後方用(10×15mm、30×30mm)を各1枚ずつ切り出します。30×30mmのテフロンシートは4隅を少し切り、角を取っておきます。前方用テフロンシートは真ん中で折り曲げ、シャシーを覆うように張り付けます。後部はテフロンシート小をシャシーの端に合わせて、縦方向に張ります。その上に、テフロンシート大を重ねます(画像7)。
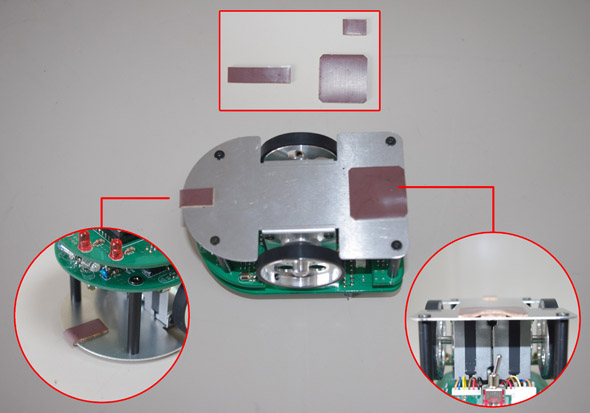 画像7 前方を包み込むのは、前進するときに迷路の段差に引っ掛からないようにするため。後方を2枚重ねにするのは、後重心だとセンサーが上向きになり壁を発見できなくなるためだ
画像7 前方を包み込むのは、前進するときに迷路の段差に引っ掛からないようにするため。後方を2枚重ねにするのは、後重心だとセンサーが上向きになり壁を発見できなくなるためだ最後にCPU基板をメイン基板の上に載せて完成です。このとき、挿入する方向に注意しましょう。CPU基板の電解コンデンサがモータドライバ側になります(画像8)。
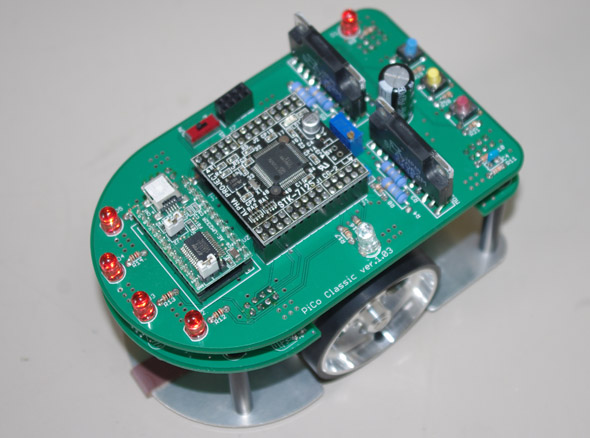 画像8 CPU基板を載せて完成! 基板の向きに要注意だ
画像8 CPU基板を載せて完成! 基板の向きに要注意だ開発環境のインストール

やったー! できたぁ〜!!

よく頑張ったね!

動くかなぁ〜。
よし、電源入れてみよっと! (パチッ!!)

……。え、えみちゃん?

あれぇ? 動かないですよセンパイ!! (ガーン)
え、えーとだね。
これはロボットだからプログラムがないと動かないんだよ。
わ、分かるよね?

あっ!
……。
……。
……て、てへぺロ〜(汗)。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CAN通信におけるデータ送信の仕組みとは?
- 過酷な資源ごみのビン色選別を自動化、PFUがイメージスキャナー技術から新規事業
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- CANプロトコルを理解するための基礎知識



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。