走れ、マイクロマウス!! 迷路攻略、完走する日を夢見て:マイクロマウスで始める組み込み開発入門(4)(2/4 ページ)
センサーの値を見るには、Pi:Co Classicを迷路上に置いて、壁を発見したときの値をチェックする必要があります。今回、北上くんはハレパネで迷路を自作しました(画像1)。迷路の作り方については、記事末尾のコラムで説明します。
センサーの動作チェックは、サンプルプログラムの「Step5_sensor_check」を使います。これまでと同じ手順で、Pi:Co Classicにプログラムを読み込みます。
Pi:Co Classicの電源をONにすると、センサー用のLEDが赤く光ります。初期状態では、壁の上方に光が照射されています(画像2)。LEDを少し下に傾けて、壁を照らすように調整します。ちなみに、センサーの調整中はモータが熱くなるので、コマメに電源をOFFにしましょう。
 画像2 初期状態では、壁の上方にLED光が当たっている
画像2 初期状態では、壁の上方にLED光が当たっている調整は、Pi:Co Classicを迷路の1区画内、前後中央に置いて行います(画像3)
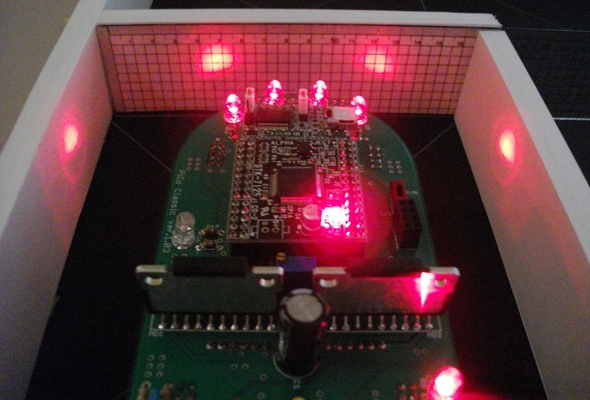 画像3 前壁にマス目の入った定規を置いて、スポットの位置や大きさをチェックしやすくしている
画像3 前壁にマス目の入った定規を置いて、スポットの位置や大きさをチェックしやすくしているチェックポイントは、
- 前センサーと横センサーのスポットを左右対称にする
- 横センサーは前壁に対して、15〜45度くらい角度を付ける
- 各スポットの大きさは、ほぼ同じくらいにする
LED(発光部)の調整ができたら、続いてフォトトランジスタ(受光部)をチェックしましょう。センサーの値を見るためには、H8マイコンの状態をPC上に表示する「ターミナルエミュレータ」が必要になります。本稿では、フリーのターミナルエミュレータ「Tera Term」を使用します。
原稿執筆時点(2012年7月時点)の最新版はバージョン4.74(teraterm-4.74.exe)です。「Tera Term(テラターム)プロジェクト日本語トップページ」からダウンロードできます。
ダウンロードが完了したら、「teraterm-4.74.exe」をダブルクリックし、インストールを開始します。言語は[日本語]を選択し、後は標準設定でインストールを進めます。
Tera Termのインストールが無事に完了したら、Pi:Co ClassicとPCをUSBケーブルで接続し、電源をONにしてからTera Termを起動します。シリアルポート設定で、COMポート番号を選択(本稿ではCOM4)し、ボー・レートを「38400」に指定(画像4)して、[OK]ボタンをクリックすると、画面にセンサーの値が表示されます(画像5)。
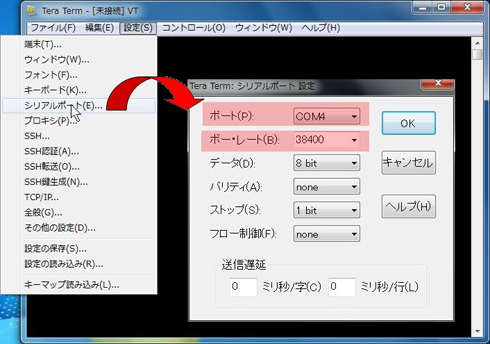 画像4 Tera Termをインストールし、シリアルポート設定を行う。COMポート番号を設定し、ボー・レートは「38400」にする
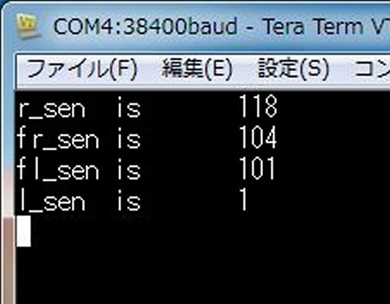
画像4 Tera Termをインストールし、シリアルポート設定を行う。COMポート番号を設定し、ボー・レートは「38400」にする 画像5 ターミナルエミュレーター上にセンサー値が表示される
画像5 ターミナルエミュレーター上にセンサー値が表示されるセンサーLEDと受光部の方向(光軸)がズレていると、センサー値が正しく取得できません。左右前壁センサー(fl_sen、fr_sen)、左右横壁センサー(l_sen、r_sen)値が、それぞれなるべく同一に近くなるよう、LED光の位置や大きさ、受光部の方向を合わせましょう。
機体を壁に近づけたり、離したりして値が変化すれば、センサーの動作確認は終了です。
「センサー値が動かない!!」時の対処方法

あれ!? 「l_sen」の値が動かないな〜。
 画像6 l_sen(左横壁)のセンサーに値が出ていない……。なぜだ!?
画像6 l_sen(左横壁)のセンサーに値が出ていない……。なぜだ!?
ホントだ!
センパイ、値がずっと「1」のままですよ!?
おかしいな……。
センサーが壊れているんでしょうか?

それは、調べてみないと分からないなぁ〜。

えぇぇ〜〜(涙)。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CAN通信におけるデータ送信の仕組みとは?
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CANプロトコルを理解するための基礎知識
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。