1Dシミュレーションで実現する車載システム開発のフロントローディング:物理モデリング環境「Simscape」で支援
自動運転技術をはじめ自動車の進化は加速している。その進化を実現するには、詳細設計における個別最適だけでなく、車載システム全体の最適を図る必要がある。その手法として注目を集めているのが、開発プロセス上流で行う「1Dシミュレーション」だ。
自動車業界において、エンジンやトランスミッション、モーターなどといった駆動システムの制御アルゴリズムを開発する用途で広く利用されているモデルベース開発。MathWorks(以下、マスワークス)の「MATLAB/Simulink」に代表されるモデルベース開発環境も一般的になってきた。
モデルベース開発のメリットは、システムに関わる各要素のモデルを基にしたシミュレーションを実施することにより、さらなる品質・効率向上が求められているシステムの最適解が得られることだ。もちろん、実機を用いた試験の削減により開発期間の短縮も期待できる。
現在、自動車の開発プロセスの中でモデルベース開発が活用されている主な領域は、既に具体的な構成が定まっている車載システムへの実装を目指す、「サブシステム設計」や「コンポーネント設計」といった詳細設計になる。ただし、自動運転技術をはじめ自動車の進化は加速している。その進化を実現するには、詳細設計における個別最適を行うだけでなく、車載システム全体の最適を図る必要がある。
機能という1つの軸で評価を行う“1D”シミュレーション
車載システムの構成の検討は、開発プロセスの中でも上流に位置する「システム設計」で行われる。システム設計では、車載システムへの要求を分析し、その結果から要求/構造設計を行い、より下流のプロセスとなる詳細設計への要求を導出することになる。
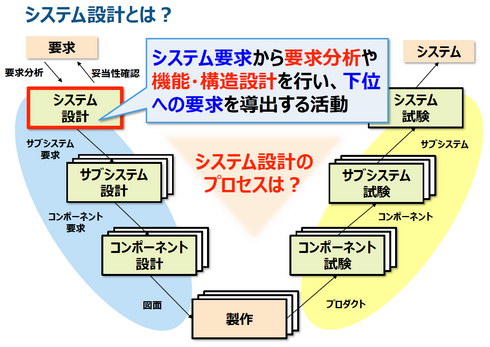 開発プロセスの中で上流に位置する「システム設計」
開発プロセスの中で上流に位置する「システム設計」このシステム設計で、制御アルゴリズムの開発と同様にモデルをベースにしたシミュレーションを適用すれば、より最適な車載システムの構成を決定でき、詳細設計にも具体的な要求を伝えることができる。
システム設計におけるシミュレーションは、詳細な制御アルゴリズムや、正確な製品形状などを導出することが目的ではない。あくまで、車載システムの機能を検討するためのものだ。機能という1つの軸で評価することから「1Dシミュレーション」と呼ばれている。これは、3Dデータを用いる詳細な3Dシミュレーションとの対比にもなっている。
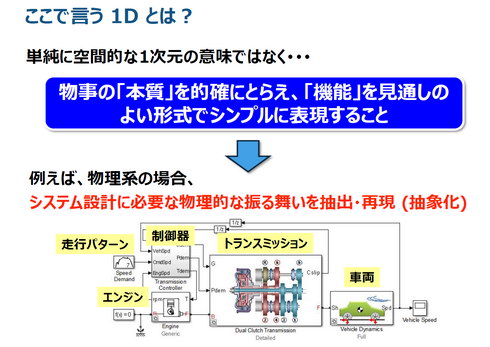 「1Dシミュレーション」の“1D”の意味
「1Dシミュレーション」の“1D”の意味1Dシミュレーションでは大まかにわけて4つの効果が期待されている。1つ目は「システム全体の最適化」だ。これまでの部品単体の個別最適だけでなく、全体最適を考慮することができるようになり、無駄の排除やシステム性能の最大化が可能になる。何より、製品価値を最大化し、コストやリスクを最小化できる。
2つ目は「システム全体の可視化」である。各機能の可視化、および機能を実現するパラメータの可視化を行える。3つ目は「技術的なブレークスルー」。設計自由度の高い上流に当たるシステム設計の段階で、アイデアを試行錯誤/すり合わせできる。いわゆる「設計開発のフロントローディング」である。そして4つ目になるのが「エンジニアの育成」だ。1Dシミュレーションでは、システム全体を俯瞰(ふかん)できるので、物理現象を理解し、製品イメージを機能展開する能力を養成しやすい。
物理モデリング環境「Simscape」が進化、1Dシミュレーションの支援に最適
MATLAB/Simulinkで知られるマスワークスも、1Dシミュレーションに関する提案活動を強化している。その中核となるのが、制御対象のモデリング環境として展開してきた「Simscape」だ。
Simscapeはさまざまな物理モデリングを自在に行える環境として提案された。モーターやインバータ、トランスミッションなどシステムの構成要素となる物理コンポーネントをライブラリブロックとして提供している。回路図を作成するように物理コンポーネントを配置、接続する直感的なモデルの記述(非因果的記述)が可能であり、システムの全体構成や要素間の相互関係を理解しやすい。また、制御アルゴリズムのモデリングはSimulinkによるデータフロー型の記述(因果的記述)が適しているが、Simscapeのモデルとの接続も容易であり、SimscapeとSimulinkはハードウェア・ソフトウェアからなるシステムを統合的に扱う1Dシミュレーションに最適な環境といえる。
またSimscapeは、1Dシミュレーションで扱うことになる、システムに関わるさまざまな物理ドメインの拡張ライブラリを豊富に取りそろえている。これらを活用すれば、例えば電気・機械・熱流体を含む物理現象の複合的な表現も容易だ。独自の物理ドメインやコンポーネントを作成するカスタマイズ機能(Simscape Language)も用意している。
さらに、MATLAB/Simulinkと完全に統合された環境であることから、豊富な設計・解析・技術計算ライブラリへ即座にアクセスし、制御アルゴリズム開発やシステム解析、システム最適化などへの応用が極めて容易であることも利点の1つになる。
MATLAB/Simulinkの最新バージョンとなる「R2016a」では、Simscapeをより最適な1Dシミュレーションの物理モデリング支援ツールとすべく大幅な改良を施した。まず、シミュレーション速度を大幅に向上した。コード生成とローカルソルバを併用した場合には、従来バージョンのR2015bに対して最大5倍もの高速化が可能になるという。また、従来は等温の流体しか扱えなかったライブラリ「SimHydraulics」を、熱流体も扱える「Simscape Fluids」に進化させた。この他、3次元機構解析ライブラリ「SimMechanics」も機能向上して「Simscape Multibody」になっている。
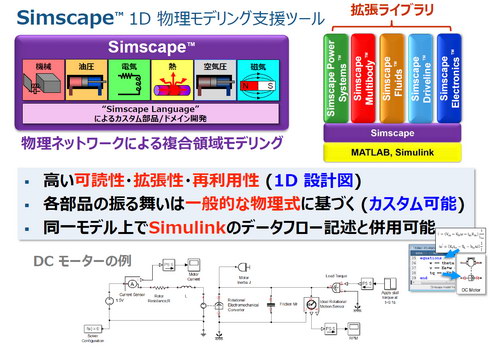 「Simscape」の概要と特徴
「Simscape」の概要と特徴シミュレーション速度を向上し、各領域のライブラリを充実させたSimscapeは、まさに、1Dシミュレーションの支援に最適なツールとして進化を遂げたといっていいだろう。
Copyright © ITmedia, Inc. All Rights Reserved.
提供:MathWorks Japan
アイティメディア営業企画/制作:MONOist 編集部/掲載内容有効期限:2016年7月14日
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。