“人とロボットが一緒に働く” 3つのポイントで壁低く:協働ロボット(2/3 ページ)
ISO規格と安全性技術
人間協調型ロボット(協働ロボット)の普及を後押しする2つ目のポイントが、安全性技術の進化とそのプロセスが明確化されてきた点である。規制緩和とも関連するが、ISOで人間協調型ロボットのリスク評価手法が整備されてきたことに加え、ロボットメーカー各社がその要求に応えるような技術をそろえてきている。
具体的には、人間協調型ロボット(協働ロボット)におけるリスク評価に関連するISO規格としては、「ISO/TS 15066」「ISO 10218-2」「ISO 12100」などが関係するとペザー氏は述べる。
「『ISO 12100』は産業用制御全体のリスク評価をするもので、リスクを定義して特定し、対策をどうするかというプロセスを規定したものだ。一方の『ISO 10218-2』は約15年前に規定されたもので、産業用ロボットそのもののリスク評価をするもの。『ISO/TS 15066』は2016年初頭に規定されたもので、協業型ロボットの安全性を規定したものである。これらに加え、第三者機関のガイドラインやサービスなどを活用することで、国内でも協調型ロボットを活用できる」(ペザー氏)
例えば、協働ロボットでは、人とロボットが一緒の空間を共有して作業を行うことになり、動作によっては人間に危害を加えてしまう可能性がある。そのため「ISO/TS 15066」では、まず作業スペースを、従来のようにロボットだけが作業する「動作スペース(通常領域)」と「協働作業スペース(限定領域)」に分けて、それぞれで安全性を確保することが規定されている。
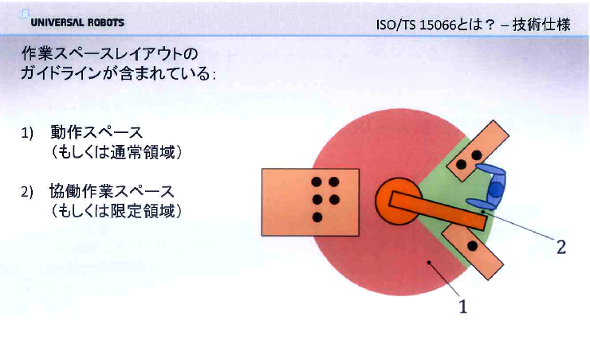 「ISO/TS 15066」の作業スペースについて 出典:ユニバーサルロボット
「ISO/TS 15066」の作業スペースについて 出典:ユニバーサルロボットまた、仮に人間と接触した際にも、けがなどの被害を最小限にするような規定なども備えている。受容可能な力や圧力、人体の苦痛や不詳の閾値などが規定されているという。ペザー氏は「人間の体のどの部分に当たるかで影響度も変わってくるので、その点についても配慮する必要がある」と述べている。
これらの規定に対し、ユニバーサルロボットでは調整可能セーフティ(安全)システムとして、15の機能を搭載。力、速度、電力、運動量、位置、ツールの向きなどを厳密に制御している他、TCPや関節スペースで監視を行い、安全性を確保しているという。設定も簡易化しており、作業スペースを協働領域、非協働領域、制限領域の3つに分け、それぞれにおける力と速度の制限など設定するだけで自動的に、それぞれのモードに切り替わるような設定方法となっているという。
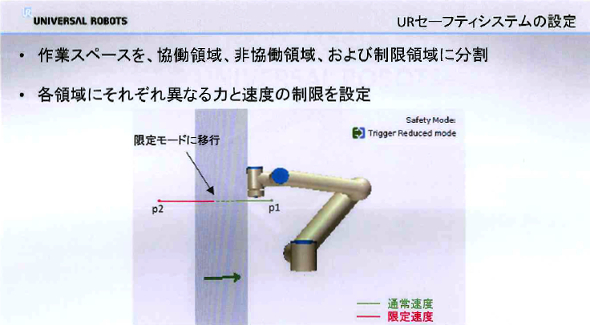 ユニバーサルロボットの安全性機能の設定
ユニバーサルロボットの安全性機能の設定Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- ラズパイの電源を入れてみた
- PLCレスで協働ロボットの外部軸を制御、自動化システム構築の工数削減
- ハノーバーメッセが開幕、AIや水素など「競争力ある持続可能な産業」の最新技術
- 品質保証とは何か、その定義を改めて考える
- HOYA、生産ラインや受注システムのシステム障害からほぼ復旧
- マレーシアで半導体ウエハーバンピングの受託加工向け製造装置増設
- IEC 62443とは何か、工場のサイバーセキュリティ対策のカギを握る国際標準を解説
- RYODENらが生成AIの事業応用で協業、現場映像と設備データの融合も目指す
- タイの半導体製造工場で新棟が完成、ソニーセミコンが生産力を強化
- カーボンネガティブコンクリートの製造実証プラントを兵庫県に建設、鹿島建設ら
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。