HILSを使ってECUをテストする(その2):いまさら聞けないHILS入門(10)(3/3 ページ)
負荷運転時の回転数制御および過回転防止機能のテスト
回転数制御機能と過回転防止機能のテストについても同様です。システムの動作の説明を省略して制御仕様を表4に、噴射量マップを図5に示します。噴射量マップは、連載第7回の「図6 発電機用エンジンのガバナー特性」を反映しています。
ここで、回転数制御機能は、一定の周波数で発電し、負荷が変化しても発電周波数の変化によって電気機器の動作に障害が生じないことが求められ、表4の仕様で回転数変化を2%以下と規定しています。
過回転防止機能試験は、電線の断線などで発電負荷が突然無くなった場合に、エンジンや発電機が急加速して、限界を超える超高回転となって遠心力などで破損しないための機能です。表4の仕様で回転数増加の限界を15%以下と規定しています。


| 手順 | Step | 項目 | テスト作業 |
|---|---|---|---|
| 2 | 回転数制御性能試験 | ||
| 1 | テスト前条件設定 | アイドリングで正常に制御している状態とする | |
| 2 | 操作 | コントロールSWを50Hzにして回転数を3000rpm(もしくは3600rpm)とし、無負荷で運転する 回転数が3000rpmで安定してから、発電機出力を0%⇒25%⇒50%⇒75%⇒100%⇒75%⇒50% ⇒25%⇒0%と変化するように、電気負荷を3秒間隔、変化時間1ミリ秒以下で変化させる |
|
| 3 | 観測・測定 | 発電機出力、回転数および噴射パルス、スロットル開度、イグニッションタイミングを測定する。負荷変化後の回転数変化が2%以下であること | |
| 3 | 過回転防止機能試験 | ||
| 1 | テスト前条件設定 | コントロールSWを60Hzにして回転数を3600rpm・全負荷運転で動作させる | |
| 2 | 操作 | 発電機出力を100%(10kW)から0%に1ミリ秒で変化させる | |
| 3 | 観測・測定 | 発電機出力、回転数および噴射パルス、スロットル開度、イグニッションタイミングを測定する。負荷変化後の回転数変化が15%以下であること | |
| 表5 負荷運転中の回転数制御性能試験と過回転防止機能のテスト手順 | |||
負荷運転時の回転数制御試験の結果分析・評価
テスト結果のイメージは、回転数制御性能試験結果は図6(a)、過回転防止機能試験は図6(b)のようになります。

図4の回転数は、3000rpmの無負荷運転が安定してから2.5kW(25%)ずつ負荷を増加して、全負荷に達するまで4回の負荷増加直後の回転数の減少を測定し、減少幅が60rpm(3000rpmの2%)を超えておらず、制御要件に適合と評価します。
また、全負荷から2.5kW(25%)ずつ負荷を減少して、無負荷に達するまで4回の負荷減少直後の回転数の上昇を測定し、増加幅が60rpmを超えておらず適合と評価します。
このテストの中でECUとプラントモデルの動作は次のようになります。
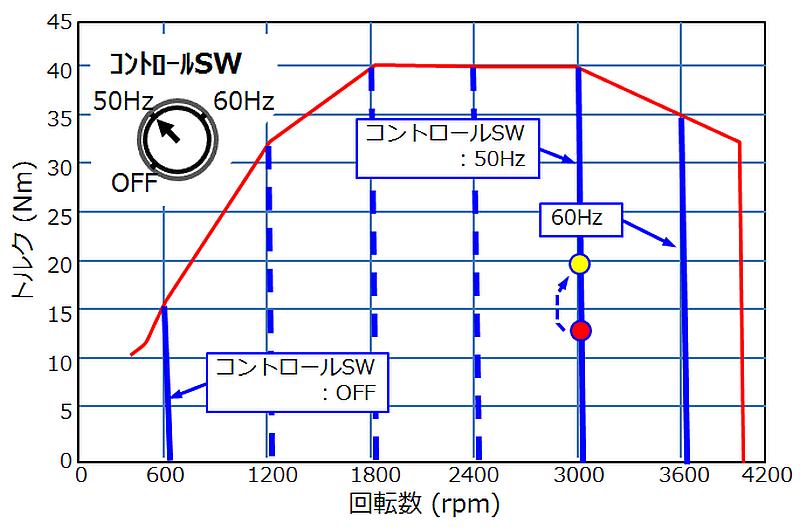
例えば、電気負荷を5kWから2.5kWに減少すると、エンジントルクはおおむね17Nmから9Nmに変化します。17Nmに対応する噴射量は、1.3mg/cycle・cyl.ですが、負荷が減少してもECUが回転変化を検出するまでは変化しないので、17Nmから10Nmを減じた7Nmのトルクが余剰となり回転数を加速します。
ECUが回転数増加を検出すると、トルクを減少させるように噴射量マップに従って噴射量を0.9mg/cycle・cyl.に減少します。図5では、●から破線に沿って●に変化します。回転数制御性能試験では、破線のふくらみとして現れる回転数変化の増加が、規定範囲に収まるか否かを評価していることになります。
過回転防止機能試験の結果分析・評価
過回転防止機能試験のテスト条件は、最も厳しい条件3600rpmの全負荷から電気負荷を一瞬で遮断します。
テスト結果のイメージは図6(b)に示すようになります。図5の噴射量マップ上にプロットすると、テスト開始時の●位置から、破線に沿って回転数を増加、噴射量をゼロに変化し、その後回転数が0rpmとなってエンジン停止します。
負荷が無くなった瞬間に急加速して、回転数が通常の制御範囲を超えますが、4000rpmをわずかに超える程度でとどまり、制御要件の4140rpm以下を満足し、その後無噴射状態のまま減速して仕様通りにエンジン停止しています。同時にパイロットランプを点滅して異常状態を表示しており、要件を全て満たしており適合と評価できます。
エンジンシステムが正常な場合のテストについては今回で終了です。次回は、システムに異常が生じた場合のテストを考えることにします。
筆者プロフィール
高尾 英次郎(たかお えいじろう) 「HILSとTestの案内人」
1950年生まれ。岐阜大学機械工学科卒業。三菱重工で大型船のエンジン・推進装置などの修繕業務を担当の後、三菱自動車(現三菱ふそうトラック・バス)に転籍。エンジンの燃費向上・排出ガス低減研究、車両の燃費向上研究を10年余および電子実験、電子設計などを20年余担当。ITKエンジニアリングジャパンを経て、現在はHILSとHILS Testにフォーカスしたコンサルティングを行っている。
HILSとの関わりは、バス用の機械式自動トランスミッション開発中に、ECUのソフト検証用として1990年にMS-DOS PCを使ってHILSをゼロから自主開発して以来のもの。
関連記事
- ≫連載「いまさら聞けないHILS入門」バックナンバー
 HILSを使ってECUをテストする(その1)
HILSを使ってECUをテストする(その1)
車載システムの開発に不可欠なものとなっているHILSについて解説する本連載。今回から、HILSを用いてどのようにECUをテストするかについて説明していきます。まずは手動テストから紹介します。 HILSにプラントモデルを組み込む
HILSにプラントモデルを組み込む
車載システムの開発に不可欠なものとなっているHILSについて解説する本連載。今回は、エンジンと発電機のプラントモデルをHILSシステムの中に組み込んで、実機と同じように動かすための手順を説明します。 HILSとプラントモデル(その3)
HILSとプラントモデル(その3)
車載システムの開発に不可欠なものとなっているHILSについて解説する本連載。今回はエンジンの負荷となる発電機のプラントモデルを検討するとともに、これまで2回にわたって説明してきたエンジンのプラントモデルと組み合わせることを考えます。 HILSとプラントモデル(その2)
HILSとプラントモデル(その2)
車載システムの開発に不可欠なものとなっているHILSについて解説する本連載。今回は、実験データを利用する統計モデルによる「プラントモデル」について考えてみましょう。 HILSとプラントモデル(その1)
HILSとプラントモデル(その1)
車載システムの開発に不可欠なものとなっているHILSについて解説する本連載。今回は、実世界の電気信号やHILS内部のデジタル信号と関連して動作する「プラントモデル」がどのようなものであるかについて考えてみましょう。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 5G通信の遅延時間1ms以下は複数端末の制御でも可能か、東芝が量子技術で道を開く
- CAN通信におけるデータ送信の仕組みとは?
- ソニーのLPWA「ELTRES」の通信モジュールが機能追加、システムの簡素化が可能に
- CANプロトコルを理解するための基礎知識
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- 【問題7】10進数を2進数に変換するプログラム
- テスト消化曲線とバグ発生曲線の7パターン診断
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 6Gに向けたサブテラヘルツ帯対応無線デバイス、100Gbpsの超高速伝送を実証
よく読まれている編集記者コラム



{kind=link}
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。