ヒトの歩く走るを数理モデル化、7つのパラメータで制御可能:医療技術ニュース
京都大学は、脳神経・筋・骨格系の数理モデルを用いて、人が歩き、走るための脳神経の制御様式を数理的に解明した。シミュレーションの結果、制御パラメーターのうち7つのパラメーターを変化させるだけで、歩行・走行とも実現できた。
京都大学は2019年1月24日、脳神経・筋・骨格系の数理モデルを用いて、人が歩き、走るための脳神経の制御様式を数理的に解明したと発表した。同大学工学研究科 講師の青井伸也氏が、IRCCSサンタルチア財団、東京大学、電気通信大学との共同研究で明らかにした。
人の動作を理解する上で、脳神経が運動に応じた筋の組み合せと活動パターン(筋シナジー)を複数用意し、それらを介して制御する「筋シナジー」という考え方が提唱されている。この考えに沿って歩行と走行の筋活動を計測すると、5つの筋の組み合せと活動パターンでほとんどの筋活動を説明できる。また、この組み合せと活動パターンは、歩行と走行で共通するものが多い。
研究グループは、5つの筋の組み合せと活動パターンを用いて、69個のパラメーターを持つ脳神経の制御モデルを構築。他に、頭と腕を含めた体幹1リンクと、左右の脚の大腿、下腿、足の6リンクからなる骨格、片脚に歩行と走行に主要な9つの筋肉を用いた筋と骨格の数理モデルを構築した。
さらに、これらの脳神経の制御モデルと筋・骨格モデルを統合した動力学シミュレーションを実施。その結果、制御パラメーターのうち7つのパラメーターを変化させるだけで、歩行・走行とも実現できた。また、7つの制御パラメーターを変えるだけで、歩行・走行とも一定の範囲で速度を変化させることができた。
今後、歩行と走行の制御様式の理解が深まることで、運動能力やコーチングの向上など、スポーツ科学への寄与が期待される。将来的には、筋シナジーに基づく治療やリハビリテーション法の開発など医療への応用、多数の関節を持つロボット、運動支援の外骨格ロボット制御など、工学的な応用も見込まれる。

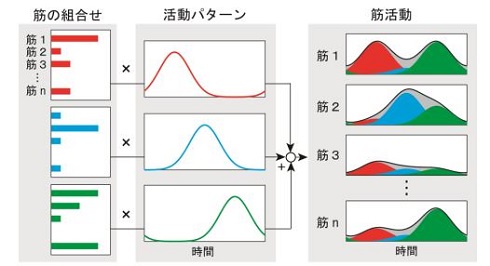 筋の組み合せと活動パターン(筋シナジー)で説明される筋活動。図は、3つの組み合せと活動パターンの例 出典:京都大学
筋の組み合せと活動パターン(筋シナジー)で説明される筋活動。図は、3つの組み合せと活動パターンの例 出典:京都大学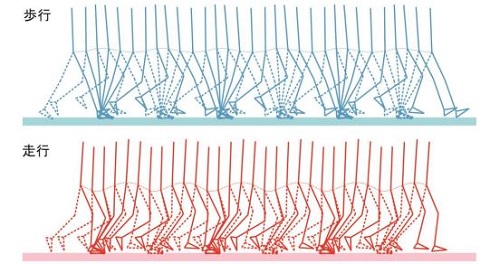 数理モデルの歩行(上)と走行(下)の様子
数理モデルの歩行(上)と走行(下)の様子関連記事
 ヒトの脳全体をシミュレーション、1秒間の神経回路の処理を5分で再現
ヒトの脳全体をシミュレーション、1秒間の神経回路の処理を5分で再現
理化学研究所は、次世代スーパーコンピュータで、ヒトの脳全体の神経回路のシミュレーションができるアルゴリズムの開発に成功した。メモリを省力化し、既存のスパコン上での脳シミュレーションを高速化できた。 映像を見て感じた内容を脳から言語化する脳情報デコーディング技術を開発
映像を見て感じた内容を脳から言語化する脳情報デコーディング技術を開発
NICT脳情報通信融合研究センターは、映像を見て感じた「物体・動作・印象」の内容を、脳活動を解読して1万語の「名詞・動詞・形容詞」の形で言語化する脳情報デコーディング技術の開発に成功した。 トヨタの仮想人体モデルに新バージョン、姿勢変化と骨や内臓の障害を同時解析
トヨタの仮想人体モデルに新バージョン、姿勢変化と骨や内臓の障害を同時解析
トヨタ自動車は2019年2月8日、衝突事故発生時の乗員や歩行者を再現するバーチャル人体モデル「THUMS」を改良し、バージョン6として発売したと発表した。最新バージョンでは、乗員の姿勢変化と、衝突時の骨や内臓の傷害を同時に解析することが可能になった。JSOLと日本イーエスアイを通じて販売する。 快適さをシミュレーションする、東洋紡の着衣解析の取り組み
快適さをシミュレーションする、東洋紡の着衣解析の取り組み
東洋紡の快適性工学センターでは、衣服の快適性について科学的な側面から取り組んでいる。今回、有限要素法により人体モデルに服を着せて動かした状態の衣服圧をシミュレーションし、導電性材料を利用した心電図を測定できるスマートウェアの開発に成功した。 インプラント設計などに有用、3D人体モデルの作成/解析ツール
インプラント設計などに有用、3D人体モデルの作成/解析ツール
JSOLは、X線CTやMRIなどから得られる人体のデータをもとに3Dモデルを作成することができる3次元画像データ変換ツール/サーフェイスメッシュジェネレータ「Simpleware」のデモ展示を行った。また、Simplewareにアドオンして構造解析を行うための変形/応力解析ソフトウェア「+CAE」も紹介した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- フォトンカウンティングCTの実用化を目指し、臨床研究を開始
- 3D画像の視認性が向上した、3D画像解析システムを発売
- 4K UHDイメージングに対応する、医療グレードボックスPCを発表
- 高エネルギー電子線をレーザーで発生、より安全ながん治療装置の確立へ
- 医療機器よりも難題!? Non-SaMDに影響が及ぶ米国のIoTセキュリティ政策
- ポータビリティ性を高めたラップトップ型汎用超音波画像診断装置
- 画像診断支援AI技術の開発を支援するクラウドサービスの提供を開始
- 持続感染性を有するウイルスの獲得に成功
- オリンパスが八王子に本社を移転、全ての事業機能を集約したグローバル本社へ
- 生体外でほぼ100%毛幹を生み出せる、毛包オルガノイドを作製



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。