軟性内視鏡とロボット技術を融合した手術支援システムを開発:医療機器ニュース
慶應義塾大学は、軟性内視鏡とロボット技術を融合させた、軟性内視鏡手術システムの非臨床試作モデルを発表した。小さな切開孔または口・肛門からの挿管で体の奥や管腔内に到達し、繊細な操作ができる。
慶應義塾大学は2019年2月8日、軟性内視鏡とロボット技術を融合させた、軟性内視鏡手術システム(Flexible Endoscopic Surgical System:FESS)の非臨床試作モデルを完成させたと発表した。同大学医学部 教授の北川雄光氏を中心に、メーカーとの産学連携体制で開発を進めたものだ。
FESSは、直径5mmの軟性ロボット処置具2本ないし3本と直径8mmの3Dカメラ1本、これらを体内に導入するための軟性オーバーチューブからなる手術動作部と、内視鏡と処置具を遠隔操作するための操作部から構成される。
執刀医はコンソールのモニターで内視鏡画像を見て、直観的に精密な操作ができる。術式によっては、既存の汎用デバイスを併用可能。持ち運べる小型軽量のユニットで、ベッドサイドへの設置やベッドレールに取り付けられるため、ロボット手術専用手術室は不要だ。
内視鏡には、脂肪に隠れた臓器の構造を可視化し、重ねて表示できる3D近赤外蛍光観察機能を搭載。本機能は、可視光映像と近赤外蛍光映像を重ね合わせて表示でき、臓器表面の色調や形の情報に加えて、通常光では見えない脂肪に隠れた重要な臓器を確認しながら手術を進められる。
FESSは体表の1つの小さな切開孔または口・肛門からの挿管で体の奥や管腔内に到達し、繊細な操作ができる利点がある。これにより、体表を大きく切開せざるを得ない患部、または腹腔鏡手術が困難であった膵臓がんなどの患部に対し、より低侵襲で安全な手術が可能になるという。
今後は、2020年代半ばの発売を目標に、産学連携体制での取り組みを加速していくとともに、器具が臓器に触れた感じが医師の手に伝わる力触覚機能を追加し、安全性をより高める研究開発も進めていくとしている。
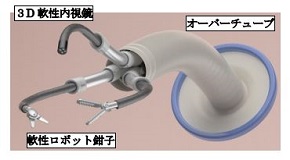 柔らかいチューブに収まった処置具 出典:慶應義塾大学
柔らかいチューブに収まった処置具 出典:慶應義塾大学 軟性内視鏡手術システム 出典:慶應義塾大学
軟性内視鏡手術システム 出典:慶應義塾大学関連記事
 2023年のメディカルソリューション市場、手術支援ロボットや遠隔医療が2倍超に
2023年のメディカルソリューション市場、手術支援ロボットや遠隔医療が2倍超に
富士キメラ総研が「メディカルソリューション市場調査総覧 2018」を発表した。注目市場として手術支援ロボットと遠隔医療関連システム、サービスを挙げ、それぞれの2023年市場を140億円、251億円と予測している。 モバイル化する医療機器、AIとロボットの活用も進む
モバイル化する医療機器、AIとロボットの活用も進む
東京ビッグサイトで2018年4月18〜20日に開催された「MEDTEC Japan 2018」。今回は、医療機器のモバイル化やAI、ビッグデータなどの先進技術に関する同イベントでの展示内容を紹介する。 独の医療機器メーカーと手術支援ロボット開発において業務提携を締結
独の医療機器メーカーと手術支援ロボット開発において業務提携を締結
メディカロイドは、KARL STORZと手術支援ロボット開発に向けた業務提携について基本合意書を締結した。両社の強みを生かし、安心して使える手術支援ロボットを国内外の医療現場に提供することを目指す。 微細手術に適用可能な低侵襲手術支援ロボットを開発
微細手術に適用可能な低侵襲手術支援ロボットを開発
東京大学は、複数の大学や企業とともに、脳神経外科などの微細手術にも適用できる低侵襲手術支援ロボット「スマートアーム」を開発した。経鼻内視鏡手術のような高度で困難な手術に、手術支援ロボットが適用される可能性が広がる。 ロボット医療機器がFDAより医療機器承認を取得
ロボット医療機器がFDAより医療機器承認を取得
CYBERDYNEは、米国食品医薬品局(FDA)より、ロボットスーツ「HAL」医療用下肢タイプ(医療用HAL)の医療機器としての市販承認を取得した。歩行機能の改善が認められる医療機器として、米国市場でも展開可能になった。 自律搬送ロボット開発企業へ出資、介護・医療業界の市場拡大を狙う
自律搬送ロボット開発企業へ出資、介護・医療業界の市場拡大を狙う
NECネッツエスアイは、自律搬送ロボット開発企業のSaviokeへの出資を発表した。既に導入が始まっているホテル業界だけでなく、介護・医療業界や卸売・小売業、製造業などへの市場拡大を狙う。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 医薬品向け製造、品質管理システムのサプスクリプション型サービスを開始
- トウモロコシ由来のオリゴペプチドが肥満や脂肪肝を改善する
- 画像診断支援AI技術の開発を支援するクラウドサービスの提供を開始
- 3ステップ約3分で40種類の薬物を尿から検出する手法を開発
- 内視鏡システムのクラウド化に関する実証実験を開始
- 骨再生材料であるリン酸八カルシウムの量産化に成功
- 医療機器よりも難題!? Non-SaMDに影響が及ぶ米国のIoTセキュリティ政策
- 米国病院は新型コロナの院内クラスター対策にDXを導入、働き方改革も進める
- AIを活用して慢性腰痛のヘルスケアを支援する技術を開発
- オリンパスが八王子に本社を移転、全ての事業機能を集約したグローバル本社へ



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。