さまざまな形状を把持する可変剛性機構付き3本指ロボットハンド:協働ロボット
NEDOは、可変剛性機構付き3本指ロボットハンド「New D-hand」を開発した。さまざまな形状の物をつかむ把持多様性を備え、動作に応じてハンドの姿勢を固定できる。
» 2020年01月08日 07時00分 公開
[MONOist]
新エネルギー・産業技術総合開発機構(NEDO)は2019年12月5日、ダブル技研、産業技術高等専門学校と共同で、可変剛性機構付き3本指ロボットハンド「New D-hand」を開発したと発表した。
3者は、2017年度に産業用のNew D-handを開発。New D-handは、1つの駆動装置で各指が物の形状に倣い、把持対象物の複雑な形状に対応できる。
今回、さまざまな形状の物をつかむ把持多様性を備え、動作に応じてハンドの姿勢を固定できる可変剛性機構をロボットハンドに付加することに成功した。各指の姿勢を任意の位置で固定し、ハンドリング位置を決める精度を向上。さらに、ロボットハンドに、人間の前腕、手首が持つ動作に応じてハンドの姿勢を固定できる可変剛性機能を取り入れた。
把持力は60N、把持開口幅は180mm。可搬質量は、包含把持で10kg、指先把持で5kg。これにより、製造、物流業界などにおける多品種ピッキング作業や、人間の手首の動きのような柔軟性が必要とされる部品挿入作業の自動化が可能となった。
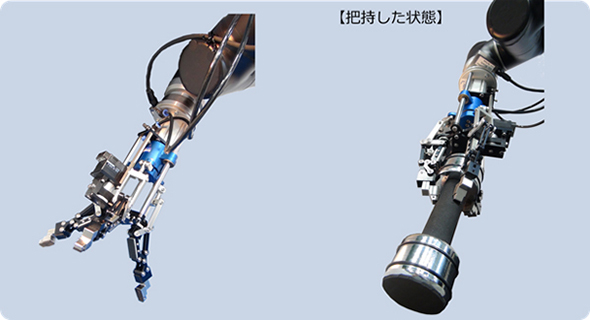 3本指ロボットハンド「D-Hand Type R」 出典:NEDO
3本指ロボットハンド「D-Hand Type R」 出典:NEDO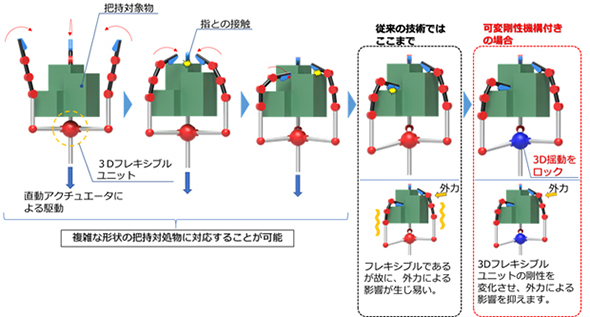 把持機能の特徴概略図 出典:NEDO
把持機能の特徴概略図 出典:NEDO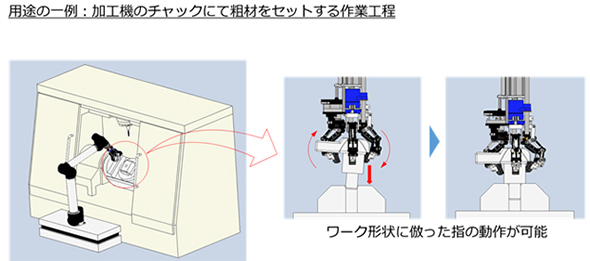 用途例とその効果 出典:NEDO
用途例とその効果 出典:NEDO 「D-Hand Type R」の標準タイプ概寸 出典:NEDO
「D-Hand Type R」の標準タイプ概寸 出典:NEDO
「FAニュース」バックナンバー
- シュナイダーが次世代産業用コンピュータのボックスモジュールにAtomモデル追加
- HOYA、生産ラインや受注システムのシステム障害からほぼ復旧
- 高出力仕様の溶接電源でより幅広い施工に対応、パナの次世代コントローラー
- 対応周囲温度と吐出し空気量が向上したオイルフリー小型コンプレッサー
- 自動盤用突切り工具の新製品、新形状のホルダとインサートが加工能率を向上
- RYODENらが生成AIの事業応用で協業、現場映像と設備データの融合も目指す
- トレーサビリティーを強化したトルクメーター、無線通信や波形データに対応
- サーバなど向け、高風量かつ高静圧ながら連続運転10万時間の長寿命な冷却ファン
- パワー半導体の電流測定が正確に、光プローブを用いた電流波形測定用センサー
- ロボットを活用したプラント保守を支援する運用ソフトウェア、Spotなど対応
関連記事
 ロボットが自律的な部品供給、組み立て作業をするAI技術を開発
ロボットが自律的な部品供給、組み立て作業をするAI技術を開発
NEDOらは、製造現場でロボットが自律的な部品供給、組み立て作業をするAI技術を開発した。多品種少量生産で、複雑な形状の部品が必要となる組み立て工程へのロボット導入促進が期待できる。 ロボット普及の課題となるハンド、人間の手の構造を「からくり」で再現
ロボット普及の課題となるハンド、人間の手の構造を「からくり」で再現
NEDOとダブル技研、都立産業技術高専は人間の手の構造を模倣することで、簡単な制御でさまざまなモノを安定的につかめるロボットハンド機構を開発した。 人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか
人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか
人手不足に苦しむ中で、工場でもあらためて自動化領域の拡大への挑戦が進んでいる。その中で導入が拡大しているのがロボットである。AIなどの先進技術と組み合わせ、ロボットを活用した“自律的な全自動化”への取り組みも進むが現実的には難易度が高く、“人とロボットの協調”をどう最適に実現するかへ主流はシフトする。 協働ロボット、ロボットシステムに残された課題と未来
協働ロボット、ロボットシステムに残された課題と未来
協働ロボットを現場で活用するのにどのような工夫が必要か――。ロボット技術の総合展示会「2017国際ロボット展」では、ロボットメーカーおよびユーザー企業によるパネルディスカッション「ロボットフォーラム2017」が実施され、協働ロボットの意義について語った。 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- ラズパイの電源を入れてみた
- PLCレスで協働ロボットの外部軸を制御、自動化システム構築の工数削減
- ハノーバーメッセが開幕、AIや水素など「競争力ある持続可能な産業」の最新技術
- 品質保証とは何か、その定義を改めて考える
- HOYA、生産ラインや受注システムのシステム障害からほぼ復旧
- IEC 62443とは何か、工場のサイバーセキュリティ対策のカギを握る国際標準を解説
- マレーシアで半導体ウエハーバンピングの受託加工向け製造装置増設
- 非固定設備で半導体洗浄装置の組み立てを効率化、AGVが部品配膳や完成品回収
- EV市場の拡大見据えリチウムイオン電池材料を生産、旭化成が北米に1800億円投資
- 高出力仕様の溶接電源でより幅広い施工に対応、パナの次世代コントローラー
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。