反射的動作を制御可能、手のひらサイズで遅延時間1msのコントローラーを開発:組み込み開発ニュース
日立製作所は、ロボットアームなどに搭載可能で、反射的動作を制御できるコントローラーシステムを開発した。エッジ、I/Oの2つの小型コントローラーとリアルタイムネットワークにより、アプリケーションに応じて最適なシステムを構築できる。
日立製作所は2020年3月18日、ロボットのアームやハンドなど限定されたスペースに搭載可能で、反射的動作を制御できるコントローラーシステムを発表した。
このコントローラーシステムは、ディープラーニング処理により得た動作制御を実行するエッジコントローラーと、センサーやモーターなどの入出力処理をするI/Oコントローラー、それらをつなぐリアルタイムネットワークで構成される。
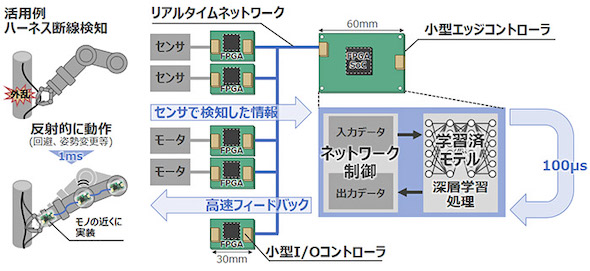 コントローラーシステムの構成 出典:日立製作所
コントローラーシステムの構成 出典:日立製作所エッジコントローラーには、CPUとFPGAを1チップに統合したFPGA SoCを搭載することで、CPUとFPGAの協調制御をやりやすくした。FPGAにはディープラーニング(深層学習)を処理する新開発の集積回路と、ネットワーク通信をリアルタイム処理する集積回路が搭載されており、CPU上のソフトウェアからこれらの集積回路を制御する。
回避や姿勢変更など反射的な動作の制御に必要な処理はハードウェアで完結し、高速でフィードバック制御する。試作したシステムで検証したところ、制御遅延1msと人の反射速度よりも速く反射動作が制御できることを確認した。
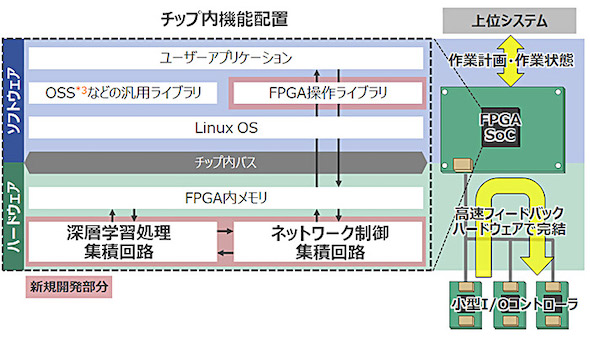 ソフトウェア、ハードウェアで協調して制御する小型エッジコントローラーの仕組み 出典:日立製作所
ソフトウェア、ハードウェアで協調して制御する小型エッジコントローラーの仕組み 出典:日立製作所I/Oコントローラーは、通信基板とその下にI/O基板を配置する基板2枚の構成とし、必要最低限の機能のみを搭載して小型化を図った。
さらに同社は、制御向けにFPGAを用いた独自のプロトコルを開発。同プロトコルを実行するネットワーク制御をそれぞれのコントローラーにハードウェア実装し、リアルタイムでのネットワーク処理を可能にした。
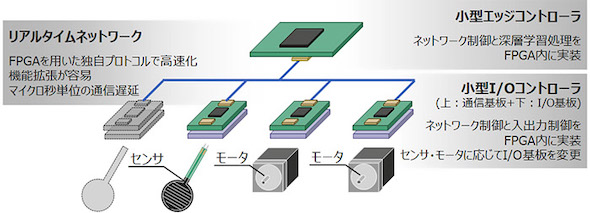 リアルタイムネットワークの仕組み 出典:日立製作所
リアルタイムネットワークの仕組み 出典:日立製作所エッジコントローラーの寸法は40×60mm、I/Oコントローラーは20×30mmと小型で、ロボットのアームやハンドに搭載しやすいサイズとなっている。2つの小型コントローラーとリアルタイムネットワークにより、アプリケーションに応じて最適なシステムを構築できる。
関連記事
 産業用ネットワークに新たな波、「TSN」が最前線へ
産業用ネットワークに新たな波、「TSN」が最前線へ
「産業オープンネット展2019 東京」では、次世代の産業用ネットワーク規格として注目を集めている「TSN」関連の展示が幾つかあった。本稿ではTSN関連の展示の中から、図研エルミック、B&R、マクニカの展示内容を紹介する。 日立がロボット事業に参入する理由は「高度なシステム化力」
日立がロボット事業に参入する理由は「高度なシステム化力」
日立製作所は、東京都内で開催したプライベートイベント「Hitachi Social Innovation Forum 2019 TOKYO」において、同社が注力しているロボティクス技術についての展示を行った。 ロボットと制御機器を一体シミュレーション、設計負担軽減と立ち上げ短期化に貢献
ロボットと制御機器を一体シミュレーション、設計負担軽減と立ち上げ短期化に貢献
オムロンは2020年3月25日、ロボットと周辺機器の動きを統合検証できるシミュレーションソフトウェア「Sysmac Studio 3Dシミュレーション」を同年4月から発売すると発表した。 パナソニックがモーション制御やI/Oなどを一体化したPLCを出展、開発負担を軽減
パナソニックがモーション制御やI/Oなどを一体化したPLCを出展、開発負担を軽減
パナソニックは「IIFES2019」(2019年11月27〜29日、東京ビッグサイト)において、モーションとネットワーク、I/O一体型のオールインワンモーションコントローラー「GM1」を出展。モーション制御開発の負担を軽減し、小型の機械などへの提案を進めていくという。 双腕型ロボットが自動でタオルをたたみサラダを盛り付ける、AI学習はVRシステム
双腕型ロボットが自動でタオルをたたみサラダを盛り付ける、AI学習はVRシステム
デンソーウェーブは、ベッコフオートメーション、エクサウィザーズなどと共同開発した「マルチモーダルAIロボット」について説明。多指ハンドを装着した双腕型ロボットアームをディープラーニングで得たアルゴリズムによってリアルタイムで制御するAIロボットであり、自動でタオルをたたんだり、サラダを盛り付けたりするデモを披露した。 1000fpsの超高速画像処理と同期してモーターを制御、産業用ロボットに展開
1000fpsの超高速画像処理と同期してモーターを制御、産業用ロボットに展開
エクスビジョンは、高速画像処理プラットフォームのソフトウェア開発キット「HSV SDK」に、イーソルのマルチコアプロセッサ対応リアルタイムOS「eT-Kernel Multi-Core Edition」を採用。「第20回 組込みシステム開発技術展(ESEC2017)」でデモも披露した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 低価格FPGAでも文字認識AIの学習は可能なのか
- インフィニオンのSiC-MOSFETは第2世代へ、質も量も圧倒
- 組み込みシステム向けRTOSのシェアはTRON系が約60%
- パナソニックの電動アシスト自転車にエッジAI機能を提供
- スバルが次世代「EyeSight」に採用、AMDの第2世代「Versal AI Edge」
- イチから全部作ってみよう(7)正しい要求仕様書の第一歩となるヒアリングの手順
- CAN通信におけるデータ送信の仕組みとは?
- 自社開発のRISC-V CPUコアを搭載した32ビット汎用マイコン
- 東武ストアが指静脈による手ぶら決済を開始、酒類対応でセルフレジ利用率60%も
- CANプロトコルを理解するための基礎知識



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。