
ロボットアームとハンドをEtherCATで一括制御、高速無停止のピック&プレース:産業用ロボット
デンソーウェーブは2020年7月16日から18日にかけて、次世代ロボットコントローラーRC9に搭載された各種アプリケーションなどを披露するオンライン展示会「DENSO Robotics Online Expo 2020」を開催した。展示会ではRC9とリニア搬送システム「XTS」を搭載したロボットによる無停止かつ高速のピック&プレース作業などが行われた。
デンソーウェーブは2020年7月16~18日にかけて、次世代ロボットコントローラーRC9に搭載された各種アプリケーションなどを披露するオンライン展示会「DENSO Robotics Online Expo 2020」を開催した。展示会ではリニア搬送システム「XTS」をハンドとして採用した、RC9搭載のロボットによる無停止かつ高速のピック&プレース作業など、多数のデモ展示が行われた。
![「DENSO Robotics Online Expo 2020」で披露されたRC9を使ったピッキング動作のデモ[クリックして拡大]出典:デンソーウェーブ](https://image.itmedia.co.jp/l/im/mn/articles/2007/28/l_tiketani1630690_densoroe2007_fig01_w490.jpg)
RC9はベッコフオートメーションとの協業により、産業用PC(IPC)にインストールするファームウェアとして開発されたロボットコントローラーである。これにより、ベッコフオートメーションの製品に限定されるものの、顧客の工場設備や環境に合わせた最適なスペックのIPCを自由に選択できるのが最大のメリットだ。この他にも、ベッコフオートメーションが開発したPCベースの制御技術「TwinCAT eXtended Automation Engineering(XAE)」を用いることで、PLC制御や、ラダープログラミング、HMIの開発の他、各種設備のモニタリングもできるといった特徴がある。
展示会ではRC9が持つ特徴を視覚的に分かりやすく示すために、さまざまなデモ展示が実施されていた。その1つとして紹介されたのが、リニア搬送システム「XTS(eXtended Transport System)」をハンド部分として採用した、RC9搭載のロボットによるピック&プレース作業デモだ。回転レール上に取り付けられた12個の可動子が一斉に動作して、一列に並べたペットボトルを高速かつ正確にピックアップした。全てのペットボトルをピックアップした後は、レールを逆回転させて、ペットボトルを再び等間隔でプレースする動作を行った。これは、ロボットとハンドのリアルタイム制御が実現できるというRC9の特徴を強調する目的で実施された。
![手前の安全柵でやや見づらいが、XTSがペットボトルを高速でピック&プレースするデモの様子[クリックして拡大]出典:デンソーウェーブ](https://image.itmedia.co.jp/l/im/mn/articles/2007/28/l_tiketani1630690_densoroe2007_fig03_w490.jpg)
XTSはイーサネットと互換性があるベッコフオートメーションが開発したオープンなフィールドネットワーク「EtherCAT(Ethernet for Control Automation Technology)」を用いたリニアモーター搬送システムだ。レール上を動く可動子は環境次第で最大毎秒4mと高速動作する上、複雑な動作を個別に行わせることも可能である。飲料用ペットボトルを始め、多種多少なワーク搬送に対応しており「ロボットのハンドとして採用すれば、これまで以上に柔軟なロボットアプリケーション対応が可能になる」(デンソーウェーブの担当者)という。
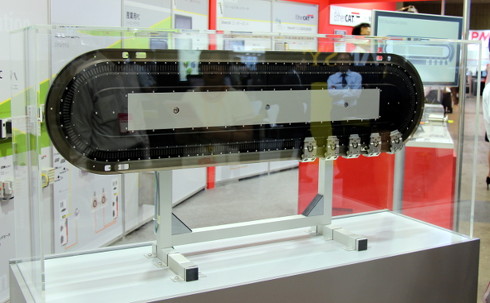 ロボットハンドとして採用された「XTS」。高精度で複雑な動作が行える
ロボットハンドとして採用された「XTS」。高精度で複雑な動作が行えるしかし、XTSが持つ高速性を最大限に生かすためには、ロボットとハンド(XTS)間での同期制御をリアルタイムで行う必要がある。搬送用ハンドは上方への移動時やワークを把持する際のチャック動作時に原則的には停止する。この時間中に次のワークをつかむ位置までロボットハンドを移動させておけば作業中のタイムロスを軽減できるが、動作のリアルタイム同期が十分でなければ移動位置にずれが生じてしまい、正確なピック&プレースが行えなくなるという恐れもある。
一方で、RC9とEtherCATでXTSとロボットの両者を連携させれば、RC9でXTSとハンドの位置が1ms単位で常に把握できる。また電磁弁にもEtherCATを使用することで、把持タイミングもリアルタイミングで制御可能となる。これにより無停止かつ高速でのピック&プレイス動作が実現可能となった。具体的な把持の仕組みについて、同担当者は「例えば、ピック&プレース作業において、XTSの可動子でワークを把持しロボットアームで移動する際に、可動子をロボットアームの動きに合わせて逆方向に動かすことで、把持したワークをその場から一切動かさずに、ロボットアームなどを動かすことができる。ワークを安定させて運ぶことができるわけだが、これらもアームとハンドが高精度に同期制御できるから実現できたことだ」と説明する。
また同担当者はRC9の活用可能性について「XTSに限らず、EtherCATを使うことでロボットとさまざまな製品をリアルタイムに同期制御できる。搬送だけでなく無停止での製品検査など、さまざまなシーンで活用できるものと考えている」と語った。
 オープン化だけじゃない、「RC9」は産業用ロボット開発の「簡単化」も目指す
オープン化だけじゃない、「RC9」は産業用ロボット開発の「簡単化」も目指す ロボットシステムで広がるオープン化、デンソーウェーブがベッコフを選んだ理由
ロボットシステムで広がるオープン化、デンソーウェーブがベッコフを選んだ理由 垂直多関節ロボット新シリーズ、新型コントローラー「RC9」と組み合わせ
垂直多関節ロボット新シリーズ、新型コントローラー「RC9」と組み合わせ 産業用ロボットをオープンに、PCでソフトウェア駆動する新コントローラーが登場
産業用ロボットをオープンに、PCでソフトウェア駆動する新コントローラーが登場 いまさら聞けない EtherCAT入門
いまさら聞けない EtherCAT入門 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -



Special Contents 2
- PR -

Special Site
- PR -

Pickup Contents
- PR -

驛「�ァ�ス�ウ驛「譎「�ス�シ驛「譎会スソ�ォ�ス�ス驛「譎「�ス�ェ驛「譎「�ス�ウ驛「�ァ�ス�ッ

Factory Automationの記事ランキング
- 中国でTOB法的手続き遅れ、牧野フ指摘にニデック「回答できる立場にない」
- 奈良で2030年700億円創出へ、DMG森精機が従来比4倍の自動化システム工場稼働
- ファクトリオートメーション用フィールドバスの歴史とは
- オムロンがドイツに新共創拠点、重要市場「欧州」のモノづくり革新を後押し
- ニデックがTOB対抗措置差止め申立て、牧野フライス「全く理由のないもの」
- まるでスマホのようにロボットを操作、ダイヘンがAR技術活用の教示装置
- 日立ハイテクが半導体製造装置の新製造棟、生産工程のデジタル化/自動化進展
- アマダが基板穴あけ加工機メーカー買収、微細化進む半導体領域を強化
- “踊り場”協働ロボット市場にサービス体制強化で挑むユニバーサルロボット
- もっと自由なCNCへ~第3期後編 PCベースCNCの登場
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。