走行テストからシミュレーションまでをシームレスにつなぐ「データドリブン開発」:自動運転技術
自動運転システムの開発において、実走行でのテストや評価に依存した従来の開発手法は限界が見え始めている。3D CGによるバーチャルな環境でテストを行う手法が注目されているが、現状ではシミュレーション環境の構築には時間やコスト、人手など多くのリソースを要する。dSPACEはこうした課題の解決策として、「データドリブン開発」を提供する。
自動車にECU(電子制御ユニット)が搭載されるようになって久しい。かつては、燃焼噴射制御やABS(アンチブレーキロックシステム)といった機能別に少数のECUが使われていたが、電子制御される部品や機能が増え、車両に搭載されるECUの数が増大した。また、各ECUが車載ネットワークで接続されるようになり、複数のECUを連携させたシステムが搭載されるなど、車両全体の電子制御化が進んだ。将来のモビリティで期待される自動運転は、このような先端技術を総合的に利用する。しかし、その実現は、膨大な開発作業の先にある。現在、自動運転レベル4〜5の実現に向けて、自動車メーカーとサプライヤーが開発を進めている。
自動運転車の実現には、現在のADAS(先進運転支援システム)以上にさまざまな情報が必要になる。カメラやミリ波レーダー、LiDAR(ライダー、Light Detection and Ranging)など複数のセンサーによる周辺環境の認知と、パワートレインやブレーキ、ステアリングなど車両の制御が高度に連携しなければならない。関連するECUの数も増える。また、車両の機能を集中管理するドメインコントローラーを中心とした新たなECUアーキテクチャも取り入れられていく。
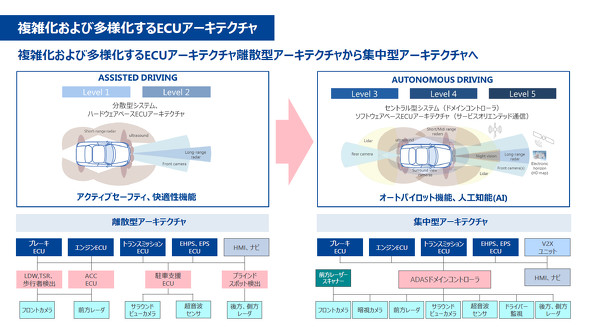 高度なADASや自動運転の実現に向けて、車載システムが複雑化していく 出典:dSPACE
高度なADASや自動運転の実現に向けて、車載システムが複雑化していく 出典:dSPACEただ、実走行でのテストや評価に依存した従来の開発手法では、膨大な試験や検証作業が必要な自動運転車の開発に対応できず、限界が見えている。無数にパターンが存在するリアルワールドのトラフィックシナリオで検証を行うには、何億kmものテスト走行が必要になる。実機のみでの検証では、テストの再現性や拡張性にも制限がある。ECUアーキテクチャから変化し、ECUの連携が複雑化することを受けて、高度な自動運転システムの信頼性検証プロセスも変わらなければならない。
そこで注目を集めているのが、3D CGによるバーチャルな環境でテストを行う手法だ。シミュレーションによって、自社が目指す仕様を満たすか、事故が発生しやすい危険な場面に対応できるかを確かめる。
実車での走行テストが不要になるわけではないが、リアルワールド偏重から脱し、HIL(Hardware-in-the-Loop)やMIL(Model-in-the-Loop)、SIL(Software-in-the-Loop)を使ったシミュレーションでの検証の比率を増やして対応することが重要だ。
ただ、現状ではシミュレーション環境の構築には時間やコスト、人手など多くのリソースを要する。dSPACEはこうした課題の解決策として、「データドリブン開発」を提供する。公道走行など実車で得たさまざまなデータを、シームレスにシミュレーション環境に活用し、効率的に検証を行えるようにするというコンセプトだ。
データドリブン開発とはどのようなものなのか、dSPACE Japan ソリューション技術部 グループリーダーの山本光氏に話を聞いた。
 dSPACE Japanの山本光氏
dSPACE Japanの山本光氏「データドリブン開発」は実車での走行テストからスタート
dSPACEは、このデータドリブン開発をサポートする各種のソリューションをそろえている。単なるソリューションの提供にとどまらず、ソリューション同士がスムーズに連携しており、さらにコンサルティングやエンジニアリング、アフターフォローまでのエンドトゥーエンドで自動車メーカーとサプライヤーを支援している。
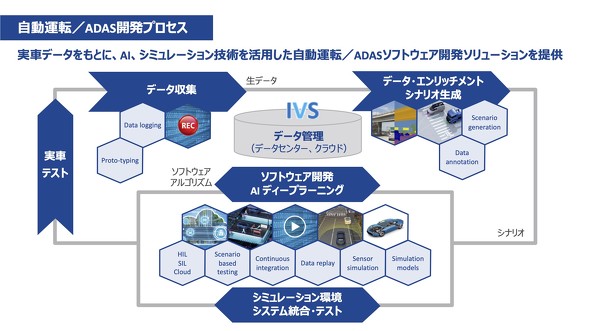 dSPACEがサポートするデータドリブン開発の全体像 出典:dSPACE
dSPACEがサポートするデータドリブン開発の全体像 出典:dSPACE自動運転システムのテストに見合うシミュレーション環境を一から構築するのは至難の業だ。自車の走行に関するパラメーターはもちろん、周辺や対向車線に別の車両を走らせるのであればその車両についてもどのように走るのか設定しなければならない。自動運転システムが認識する対象は、歩行者や信号、道路の白線など全てシミュレーション上に置く必要がある。道路の幅や勾配、交差点のレイアウトなどの設定も発生する。
そこでdSPACEでは、車両が各種のセンサーを搭載して実際に道路を走行した際のデータを基に、バーチャルなシミュレーション空間を作るソリューションを提供している。これによって、自動車メーカーやサプライヤーはテスト環境の構築ではなく、自動運転システムの開発にリソースをより多く投入できる。既にHILを活用している場合でも、実車の走行試験で得られる膨大なデータをシームレスに取り入れることでシミュレーションでの検証を充実させることが可能だ。
データドリブン開発は、実車の走行試験でのデータ取得のフェーズからスタートする。dSPACEでは、車両に搭載するハイエンドのデータロギングツール「AUTERA」を用意している。AUTERAは6つのPCI Expressスロットを備えており、2本のデータストレージユニットを搭載可能で、最大50GBit/sのロギング帯域幅を実現している。10ギガビットイーサネットにも対応している。レベル3〜5の自動運転車から取得できるデータをカバーするという。
AUTERAにはハイエンドのGPUを統合するオプションがあり、これを利用することで各種のセンサーやカメラで取得したデータにリアルタイムで前処理を行い、その結果を記録することもできる。また、データ収集だけでなく、データのリアルタイム再生やラピッドプロトタイピングのハードウェアとして使うことも可能だ。
これまでは、取得した膨大な走行データをどのように管理し、必要なときに取り出すかが課題となっていた。AUTERAで収集したデータは「IVS(Intempora Validation Suite)」というクラウドサービスによって管理される。IVSを使うと、実際の走行でデータを取得する際「交差点の通過」や「雨の走行」といった具合に、シーンごとにタグが付加できる。dSPACEでは、状況に関するタグ付けを行うツール「RTag」を用意している。RTagによる作業は同乗者が手動で行うことになるが、このタグがあるとバーチャル空間を生成する際、元となるシーンをスムーズに検索できる。
走行データがシナリオになるまで、さまざまな処理
AUTERAで取得したデータが3D CGのシミュレーション環境になるには、「データエンリッチメント」と「シナリオ生成」というフェーズを経る。まず、データエンリッチメントでは、データの匿名化とアノテーションを行う。dSPACEは、取得した走行データの中からモザイク処理が必要な箇所や、アノテーションを行う対象を自動的にピックアップする技術を持つUnderstand.aiを子会社化した。これにより、走行データの収集からシミュレーションでの利用に必要な処理までをシームレスにカバーしている。
欧州では、GDPR(General Data Protection Regulation、一般データ保護規則)によって個人が特定できるデータを保持することが許されない。そのため、車載カメラが捉えた映像から歩行者の顔や車両ナンバーなど個人が特定できる部分をピックアップし、そこだけにモザイク処理を施す。
加えて、アノテーションでは開発する自動運転システムが認識対象としているものに対してラベル付けする。例えば取得したデータに「クルマ」「標識」といった情報を付加する作業だが、アノテーションの対象を半自動的に追跡する独自のソリューションで作業負担を軽減する。カメラの映像だけでなく、LiDARの点群データにもアノテーションを行うことができる。アノテーションを行ったデータは、次の工程であるシナリオ生成だけでなく、AI(人工知能)の教師データとして使用することも可能だ。
アノテーションデータや実車で収集したデータを基に生成されるのが、リアルワールドを3D CGで再現する「シナリオ」だ。このシナリオを使って、走行中に実際に起きた出来事を繰り返し検証したり、周辺車両の数や天候、日照などを変更した状況でテストしたりすることができる。
バーチャル空間を規定する「シナリオ」の生成
シナリオは4つの要素で構成されている。1つ目は「Maneuver」と呼ばれるもので、自車のコントロールに関する設定を示す。あるシーンにおいて、交差点に差し掛かる自車を右折させるのか直進させるのかなど、その動きをパラメーターで決める。2つ目は、周辺にいる車両や人などの動きだ。これは「Traffic」という要素で、もし周囲に30台の車両がいるなら、それぞれについて位置やスピード、動きなどを規定する。3つ目は「Scenery」と呼ばれるもので、建物や信号機などの位置やサイズ、状態などを規定する。そして最後の4つ目が「Road」という要素で、車両が走る道を規定する。
dSPACEのシナリオ生成サービスでは、ユーザーは実車の走行試験で取得したデータからシミュレーション上で再現したいシーンを選択するだけでシミュレーションに使用するシナリオを入手可能だ。生成されるシナリオのタイプは大きく2種類あり、取得した走行データと全く同じ場面をそのままバーチャルに再現したReplay Scenarioと、自車両や周辺車両などのシナリオを構成する各要素のパラメーターをユーザーが変更できるLogical Scenarioに分けられる。
このシナリオは、dSPACEがラインアップに持つHILのプラットフォーム「SCALEXIO」やSILプラットフォームの「VEOS」、クラウドでのシミュレーションに広く使うことができる。
 実車の走行データがシミュレーションのシナリオとなり、HILやSILで活用することができる 出典:dSPACE
実車の走行データがシミュレーションのシナリオとなり、HILやSILで活用することができる 出典:dSPACEまた、カメラやミリ波レーダー、LiDARといったセンサーのシミュレーションにも同じシナリオで対応する。センサーシミュレーションでは、実際にセンサーを車両に取り付けた時にセンサーから出力されるデータ相当のセンサー出力摸擬が可能となる。カメラではレンズ特性、口径食、色収差等を考慮した出力が可能であり、ミリ波レーダーはアンテナ特性、偏波の考慮などが可能である。さらにLiDARではScan/Solidタイプの摸擬や天候の影響を考慮したシミュレーションが可能となる。
既にHILやSILを使っているのであれば、シナリオを今まで以上に有効活用する上でデータドリブン開発が貢献する。実車の走行テストで得た走行データをシームレスかつ効率的にシナリオに取り入れることで、さらに高度な検証を行うことができる。
dSPACEでは、生成したシナリオをベースにさらに効率的な検証を実現するため、クラウド上でのシナリオベーステストの開発を進めている。自動運転車の安全性を示すには、割り込みや合流、障害物の回避、前方車両の急減速など事故が起きやすい場面への対応が問われる。こうした場面では、自車と対象車両の速度や速度差によって事故が起きるケースと安全なケースがあるため、シミュレーションでは、「事故が起きるかどうかの境界線(コーナーケース)」に集中してテストすることが望ましい。
ただ、コーナーケースを特定するまでのテストや、コーナーケースが判明した後の検証を人力で繰り返すのは負担が大きい。dSPACEでは、こうした膨大なシミュレーションを自動的に実行するテストマネジメント機能や、コーナーケースなど危険な状況を重点的に検証することを可能とするシナリオベーステストの開発を進めている。クラウドでのテストもデータドリブン開発の一部であり、実走行のデータを基に生成したシナリオが活用できる。
このように、実車での走行データの収集に始まり、シミュレーションのシナリオやAIの学習に不可欠なデータの管理や処理、HILやSILでのシナリオ活用までをシームレスにつなげたのが、dSPACEのデータドリブン開発だ。自動運転システムの信頼性を証明するために、リアルワールドで何億kmもの走行テストを重ねるのは現実的とは言い難い。シミュレーションをいかに有効活用し、効率的に検証できるかが、自動運転車の実用化に懸かっている。
データドリブン開発に関するオンラインセミナーを定期的に開催
dSPACEでは、シミュレーションを使った自動運転やADASの開発、開発の効率化、実車走行時の計測データ資産の有効活用に興味のある人を対象に、無料のオンラインセミナーを開催する。1回当たりの定員は決められているが、定期的に開催してデータドリブン開発について発信する。
また、データロギングやオープンなプラントモデル、センサーシミュレーションなどを解説するセミナーも予定している、第1回が2020年11月18〜19日の2日間、第2回が同年12月8〜9日の2日間だ。その後も継続して開催する予定で、データドリブン開発やシミュレーション活用について理解を深めてもらう機会を多数用意していく方針だ。
関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
提供:dSPACE Japan株式会社
アイティメディア営業企画/制作:MONOist 編集部/掲載内容有効期限:2020年12月10日


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。