
可視光カメラ画像の荷物形状を“点”から推定するAI、世界最高精度を達成:人工知能ニュース
東芝は、一般的な可視光カメラで撮影した画像から、不規則に積み重なった物体の個々の領域を高精度に推定するAI技術を開発したと発表した。公開されているピッキングロボット向けデータセットを用いた実証実験では、物体領域の推定における計測誤差で、既存のAI技術と3Dセンサーの組み合わせを上回る「世界トップの性能」(同社)を達成した。
東芝は2020年11月30日、一般的な可視光カメラで撮影した画像から、不規則に積み重なった物体の個々の領域を高精度に推定するAI(人工知能)技術を開発したと発表した。公開されているピッキングロボット向けデータセットを用いた実証実験では、物体領域の推定における計測誤差で、既存のAI技術と3Dセンサーの組み合わせを上回る「世界トップの性能」(同社)を達成したという。2021年度には、このAI技術を組み込んだ物流倉庫など向けの荷降ろしロボットを市場投入する計画である。

物流倉庫の荷降ろしやピッキングに用いられているロボットは、ロボットの先端部などに装着した3Dセンサーなどを用いて積み重なった荷物を上からセンシングして個々の荷物の形を認識し、「把持計画」を作成してから目的の荷物を把持するという動作を行っている。今回開発したAI技術は、3Dセンサーではなく一般的な可視光カメラの画像データからでも把持計画に必要な荷物の形状認識を正確に行えることが特徴になる。

高さに関するデータも得られる3Dセンサーを用いる場合、高い荷物の形状認識精度が得られるものの、周辺環境と合わせ込むための調整や、組み上げたシステムを使って現地でAIの学習を行う必要があるなど導入のためのハードルが高い。一方、開発したAI技術は、調整が極めて少なくて済む可視光カメラを用いながら、3Dセンサーを用いる場合と同等以上の荷物の形状認識精度を実現しており、AIの学習を事前に行うなどして即時導入を可能にするとともに現地調整を短縮することによる導入コストの削減も実現できるとしている。
長方形に切り出してからではなく、点から物体の領域を推定する
画像データから個々の物体領域を推定するAI技術としては、画素単位で画像内の個々の物体の種類と領域を推定する「インスタントセグメンテーション」が知られている。インスタントセグメンテーションの中で最も広く用いられている「Mask R-CNN」は、入力画像内の物体がある候補位置を長方形で切り出してから、その長方形内に含まれる物体の領域を推定する方式だが、物流倉庫の荷物のように物体が重なって映っている場合には正しく物体の領域を推定できないという課題があった。「特に、荷降ろしやピッキングに用いるロボットのように上方から撮影する画像で生じやすい」(東芝 研究開発センター 上席研究員の野田玲子氏)という



東芝が今回開発したAI技術は、Mask R-CNNのように物体がある候補位置を長方形で切り出すのではなく、何らかの物体があると思われる画素の中から最も確からしい候補点を推定し、その候補点を含む物体の領域を推定するという手法を採用した。このため名称も「点候補ベース物体領域抽出技術」となっている。「物体内の候補点を起点として、その点が属する物体領域を推定するので、重なっている物体でもそれぞれの領域を正しく推定できる」(野田氏)。


実際に、ピッキングロボット向けデータセットである「WISDOM dataset」を用いた推定精度について、Mask R-CNNや、3Dセンサーの震度画像を用いてMask R-CNNを行う「SD Mask R-CNN」と比較すると、点候補ベース物体領域抽出技術はSD Mask R-CNNを上回る結果が得られた。また、同AI技術に基づくアルゴリズムはCPUで動作可能であり「荷降ろしして次に現れる荷物形状もほぼ即時に認識できるなど、リアルタイム性も高い」(野田氏)としている。ただし、ロボットが吸着ハンドなどを使って荷物を把持する際には、距離センサーなどを使ってロボットハンドから荷物までの位置を計測する必要がある。

今後は、2021年度に市場投入予定の物流倉庫向け荷降ろしロボットの他にも、工場でのマーシャリングや箱詰め、小売店舗における無人レジや棚卸しなどへの適用も想定している。なお、点候補ベース物体領域抽出技術については2020年11月30日~12月4日までオンラインで開催されるコンピュータビジョンの国際会議「ACCV 2020」で発表される予定だ。
物流現場における自動化が進む中、倉庫内の荷物の搬送のみならず、荷降ろしやピッキングなどの作業もロボットによる自動化が進められている。こうした物流ロボットの国内市場は、2030年度に2020年度比で約8倍の1500億円規模まで拡大すると予測されている。また、新型コロナウイルス感染症の感染拡大により、非接触や倉庫内でのソーシャルディスタンス確保のニーズも高まっており、物流ロボットの導入がさらに加速する流れにある。
 AIと機械学習とディープラーニングは何が違うのか
AIと機械学習とディープラーニングは何が違うのか 機械学習はどうやって使うのか――意外と地道な積み重ね
機械学習はどうやって使うのか――意外と地道な積み重ね CPSテクノロジー企業を目指す東芝、ソフトウェアはどのように開発しているのか
CPSテクノロジー企業を目指す東芝、ソフトウェアはどのように開発しているのか 顔と氏名を瞬時にひも付け特定/追跡、TDSLの顔認識AI搭載ソリューション
顔と氏名を瞬時にひも付け特定/追跡、TDSLの顔認識AI搭載ソリューション CPUだけでリアルタイム群集計測を実現、東芝が従来比4倍性能の深層学習技術
CPUだけでリアルタイム群集計測を実現、東芝が従来比4倍性能の深層学習技術 東芝から世界最高精度の自動運転AI技術が2つ、推定誤差を従来比4割削減
東芝から世界最高精度の自動運転AI技術が2つ、推定誤差を従来比4割削減Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -

Special Contents 1
- PR -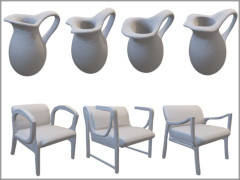

Special Contents 2
- PR -

Special Site
- PR -
Pickup Contents
- PR -
繧ウ繝シ繝翫�繝ェ繝ウ繧ッ

Factory Automationの記事ランキング
- 目指すのは省人化ではなく売上増、小売業向け”黒子”ロボは現場に何をもたらす?
- ニデックの牧野フライスTOBに産業別労組反対声明、牧野労組は9割反対
- その対策が脅威に……OTセキュリティで今起きている怖いこと
- 混乱の時代に業界の道筋を示す……ハノーバーメッセ2025が開幕
- 牧野フライスが時間確保目的の買収対抗策導入、ニデック「極めて遺憾」
- 世界シェアトップの測長SEMをDigital&Cleanで生産、日立ハイテクのマリンサイト
- 段ボール箱自動組み立て/搬送システム、寸法入力だけの簡単操作
- ニデックと牧野フライス、TOBを巡る動き
- 半導体故障解析装置などの工場新設、韓国での開発/製造体制を強化
- 点検用巡回ロボットに点検AIを搭載、アナログメーターの点検業務を自動化
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。