自律型海中ロボットが海氷下の全自動潜航と海氷裏面の全自動計測に成功:ロボット開発ニュース
東京大学生産技術研究所は、海氷や棚氷の下で海氷裏面を全自動計測するAUV「MONACA」を開発した。北海道紋別港で海氷下を全自動潜航し、海氷裏面の形状データを取得した。2021年度以降の南極海への展開に備える。
東京大学生産技術研究所は2021年3月18日、海氷や棚氷の下で海氷裏面を全自動計測する自律型海中ロボット(Autonomous Underwater Vehicle:AUV)「MONACA(Mobility Oriented Nadir AntarctiC Adventurer、モナカ)」を開発したと発表した。北海道紋別港で全27回、延べ8時間17分、8.9kmにわたり海氷下を全自動潜航し、延べ4万7143m2の海氷裏面の形状データを取得した。
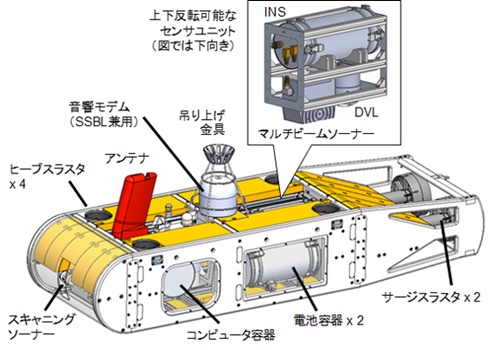 海中ロボット「MONACA」 出典:東京大学生産技術研究所
海中ロボット「MONACA」 出典:東京大学生産技術研究所MONACAは、南極海の氷海域探査を目的として開発。全長は2.1m、空中重量は235kg、最大潜航深度は1500m。動作時間は8時間で、氷の裏側へ最大10km潜入できる。マルチビームソーナーとドップラー式対地速度計、慣性航法装置を備えたセンサーユニット、氷に対する相対ナビゲーションアルゴリズムなどを搭載する。センサーユニットは上下反転が可能で、氷の下の海底の計測にも対応する。
潜航実験では、氷を砕いて作った狭い開口部から、AUVの展開と回収を実施した。また、AUV自身が氷に対して相対的に測位しながら往復することで、幅広い範囲を計測し、自律的に開口部に帰還することに成功した。10分間、走行距離80mにわたる完全無索潜航にも成功し、高い自律性と安全性、高度なナビゲーション能力を示すことができた。
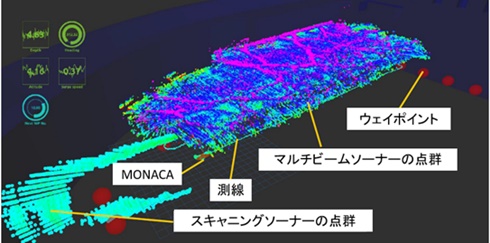 観測中の様子 出典:東京大学生産技術研究所
観測中の様子 出典:東京大学生産技術研究所今後は、氷に対する相対ナビゲーションアルゴリズムの性能向上を図り、2021年度以降に予定している南極海の完全結氷域の調査に備える予定だ。
関連記事
 ドローンでカキ養殖場の水中環境を可視化、ローカル5G通信を用いた実証実験開始
ドローンでカキ養殖場の水中環境を可視化、ローカル5G通信を用いた実証実験開始
レイヤーズ・コンサルティングは2021年1月27日、カキの海面養殖場における海中の状況をローカル5Gネットワークに接続した水中ドローンで可視化する実証実験について発表。ドローンに搭載したセンサーで酸素不足が生じた養殖場内の水域を素早く把握。カキの生産数低下につながる効果が期待される。実験期間は2021年1月25日週から同年2月8日週までを予定。 拡大期待の海洋IoT、機器開発を支える海洋計測技術の存在
拡大期待の海洋IoT、機器開発を支える海洋計測技術の存在
宇宙以上に未知の領域だとされる海の世界だが、ロボティクスやIoTなどの技術進歩により新たに海洋探査や測定などが盛り上がりを見せようとしている。しかし、こうした「海で使う機器」の開発には、特有のノウハウが必要になり、実際に試験を行うのも大きな負担になる。こうした「海で使う機器」の試験や、海洋計測機器の開発を行うのがOKIグループのOKIシーテックである。OKIシーテックの取り組みについて新たに代表取締役社長に就任した中井敏久氏に話を聞いた。 全樹脂電池を自律型無人潜水機に搭載する実証実験を開始
全樹脂電池を自律型無人潜水機に搭載する実証実験を開始
APBは、全樹脂電池を川崎重工業の自律型無人潜水機に搭載する実証実験を開始した。同電池は、樹脂構成のためセルの大型化が可能で、積層時のエネルギー密度が高い。また耐水圧性を有し、無人潜水機の動力源としての活用が期待される。 自律型海中ロボットなど3台が連携、広範囲の海底面の3次元画像取得に成功
自律型海中ロボットなど3台が連携、広範囲の海底面の3次元画像取得に成功
東京大学 生産技術研究所は、コバルトリッチクラストが分布する南鳥島南西の拓洋第5海山において、3台のロボットを連携させ、広範囲に及ぶ海底面の3次元画像を取得することに成功した。 最後のデジタルデバイドである「水中」、水中無線技術は日本を救うか
最後のデジタルデバイドである「水中」、水中無線技術は日本を救うか
ALANコンソーシアムは2019年10月8日、東京都内で会見を開き、同団体が行っている水中用LiDAR(Light Detection and Ranging、ライダー)や光無線通信、光無線給電などの技術開発について、進捗を説明した。 海洋国家日本の最後のフロンティアは「水中」、LiDARや光無線技術で市場創出へ
海洋国家日本の最後のフロンティアは「水中」、LiDARや光無線技術で市場創出へ
ALANコンソーシアムが、水中で用いるLiDARや光無線通信、光無線給電などの技術開発や市場創出に向けた取り組みについて説明。2019〜2021年度の3年間をめどに、水中光無線技術の確立を目指す。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
ロボットの記事ランキング
- 油圧ならトン単位の力も出せる、ブリヂストンのゴム人工筋肉
- “着る”歩行支援ロボットを2021年夏に発売へ、人の動作を見極めて正しく支援
- ロボットに使われる分散処理、なぜ「ROS」が好まれるのか
- ロボット開発で注目される「ROS」(Robot Operating System)とは何か
- 保険適用が拡大する手術支援ロボット「da Vinci」、デジタル活用でアプリも投入
- ロボットに必要な要素技術
- 優しくハグする力持ちのクマ型ロボット
- 減速機にアキシャルフラックスモーターを一体化した超偏平アクチュエーター
- 屋内の地図は天井にアリ? LiDARを5つ搭載するパナソニックの自律搬送ロボの安全性
- 「実物大の動くガンダム」を実現した道筋とは、プロジェクト関係者が経緯を語る
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。