
車側の意思でハンドルを回転させる!? EPS:いまさら聞けない シャシー設計入門(12)(2/3 ページ)
EPSシステムの仕組み
EPSシステムは、
- 操舵力と路面反力を検知するための「トルクセンサー」
- 操舵力をアシストする「アシストモータ」をピニオン部に備えたギアボックス
- 車速によって最適なアシスト力を行うための「車速信号」
- 各センサーからの情報を基にして最終的なアシスト量(電流量)を決定し、アシストモータを駆動するEPSコントロールユニット
などで構成されています。
トルクセンサーの操舵力と路面反力を検知する方法はさまざまですが、それほど大きな違いはありませんので基本を抑えておけば必要十分だと思います。
EPSも油圧式同様に「トーションバーのねじれ」を利用します。
ピニオンは油圧式同様に上部と下部とが一体になっておらず、トーションバーで連結しています。トルクセンサーは、主にピニオン上部(インプットシャフト)と下部(ピニオンギア)との位相ズレを電気的に検知(磁束密度の増減)することで操舵力ならびに路面反力としてEPSコントロールユニットに情報として送っています。
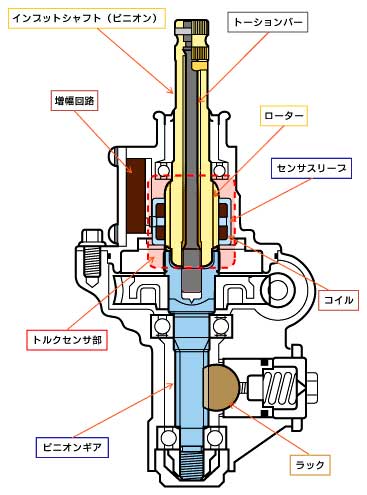 図2 トルクセンサー
図2 トルクセンサーイラストのように、インプットシャフト下部とピニオンギア上部は真横から見ると重複している部分があります。この部分がトルクセンサーであり、外周がピニオンギア(センサースリーブ+コイル)で内周がインプットシャフト(ロータ)となっています。この状態で複数の突起があるロータが回転する(トーションバーがねじれる)ことによってセンサースリーブの窓とロータの突起が近づいたり遠ざかったりします。この動きによってコイルの磁束密度が増減し、電圧も変化します。
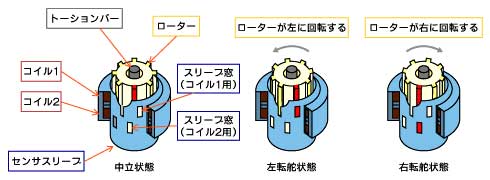 図3 トルクセンサーの検出例
図3 トルクセンサーの検出例この変化を読み取ることで操舵方向と操舵トルクを検出することができます。
EPSコントロールユニットは、トランスミッションからの車速信号をECU経由で受信しています。
またEPSコントロールユニットは、トルクセンサーと車速センサーからの信号を基に、アシストモータを駆動するための基本電流値を演算して、アシストモータ内にあるアーマチュアコイルに流す電流の大きさと向きを切り替えます。これによって回転トルク(アシスト量)の大きさと回転方向の正転・逆転を行います。
とはいっても車を運転していると急激な路面抵抗の変化はつきもので、基本電流だけでは正常な運転(状況に応じた自然な操舵力)はできません。
油圧式では「路面反力=操舵力の変化」として感じることができ、それほど細かな制御は必要なかったのですが、EPSは「走行状態(操舵力)を電気的に再現する」という非常に難しい制御が必要になります。
例えば交差点を左折した後などにハンドルの復元力が「ホイールアライメント」によって発生しますが、そのときに中途半端にモータアシストが働くと非常に不自然な感じになります。
いまでこそ非常に自然な感覚(油圧式パワーステアリング)に近づいてきましたが、EPSがそれほど普及していないときは、本当に不自然な感じが全面に出ていました。いかにも「モータでアシストしていますよ!」という違和感があったのです。
Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -


Special Contents 1
- PR -
Special Contents 2
- PR -

Special Site
- PR -
Pickup Contents
- PR -





よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。