
パナソニックが車内外のセンシングにTOFカメラを提案、“1台3役”を強みに:自動運転技術
パナソニックは、NVIDIAのユーザーイベント「GTC 2019」(2019年3月19~21日、米国カリフォルニア州サンノゼ)において、車内外のセンシング向けにTOF(Time Of Flight)方式の2種類のカメラを提案した。車内向けではジェスチャーによる操作や乗員の姿勢や行動を認識し、車外向けでは“1台3役”で周辺監視を行う。周辺監視用はハードウェアの工夫で解像度の向上を進め、最短で2024年ごろの製品化を目指す。

パナソニックは、NVIDIAのユーザーイベント「GTC 2019」(2019年3月19~21日、米国カリフォルニア州サンノゼ)において、車内外のセンシング向けにTOF(Time Of Flight)方式の2種類のカメラを提案した。車内向けではジェスチャーによる操作や乗員の姿勢や行動を認識し、車外向けでは“1台3役”で周辺監視を行う。周辺監視用はハードウェアの工夫で解像度の向上を進め、最短で2024年ごろの製品化を目指す。
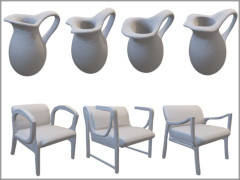
TOFカメラは近距離用と20~30mの長距離用の2種類を展示した。近距離用は、深層学習(ディープラーニング)のアルゴリズムで手のジェスチャーのパターンや、乗員の動作を識別する。乗員の動作は関節の動きから、ステアリングを握る姿勢、携帯電話機を手に持ちながら運転している様子、体調不良でステアリングの上に伏せる様子などを判断できる。
周辺監視用としては、歩行者までの距離や歩行者が動く方向などを検知する用途を想定している。可視光カメラやLiDAR(Light Detection and Ranging、ライダー)といったセンサーと比べた特徴として、センサーフュージョンが不要であることを挙げる。
異なる種類のセンサーを組み合わせた場合、センサーの搭載位置の違いによる視差も含めて統合処理する必要がある。パナソニックのTOFカメラは物体の形と物体までの距離に加えて可視光カメラとしての画像も同時に得られるため、センサーフュージョンが不要な1台3役のセンサーとして提案する。車載用での製品化に向けた課題は解像度だという。現在の開発品はVGAレベルのため、ハードウェアの工夫で解像度を改善する開発を進めている。




おすすめホワイトペーパー
 夜間に物体までの距離と形を同時に検知、250m先まで対応
夜間に物体までの距離と形を同時に検知、250m先まで対応 ローソンも検討中のIoTデジタル販促サービス、「Kinect」をTOFセンサーに変更
ローソンも検討中のIoTデジタル販促サービス、「Kinect」をTOFセンサーに変更 パナソニックのIoTセキュリティ、AIとSOCで自動車も工場もビルも守る
パナソニックのIoTセキュリティ、AIとSOCで自動車も工場もビルも守る 大規模化する車載ソフト、パナソニックは品質とセキュリティを確保できるのか
大規模化する車載ソフト、パナソニックは品質とセキュリティを確保できるのか 「中国メーカーにも売る」トヨタとパナソニックが車載用角形電池の合弁会社設立
「中国メーカーにも売る」トヨタとパナソニックが車載用角形電池の合弁会社設立 パナソニックのクルマの作り方、デザイナーとエンジニアで一緒に企画すると……
パナソニックのクルマの作り方、デザイナーとエンジニアで一緒に企画すると……Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -
Special Contents
- PR -


Special Contents 1
- PR -
Special Contents 2
- PR -

Special Site
- PR -
Pickup Contents
- PR -

モビリティの記事ランキング
- 日産が再起に向け新型車と第3世代e-POWERを全世界に展開、3代目リーフはNACS対応
- マツダはEV専用工場を作らない、投資を抑えながら電動化黎明期に臨む
- VWがエントリーレベルの新しい電気自動車を世界初公開
- 自律航行型無人船でホンダ社員が起業、海洋観測を安価で手軽に
- NSKが電動パワートレイン向けに小型軽量化深溝玉軸受を開発
- SDVに向け不足する組み込みソフトエンジニア、Linux FoundationとJASAが育成へ
- 海保の船は巡視船だけじゃない、影の主役「海保測量船」のフナデジ!
- 日系乗用車メーカーの生産台数ランキング、2025年1月の2位はスズキ
- SiC CMOSパワーモジュールを用いたモーター駆動に成功
- 中国のEV急速充電は「kW」から「MW」の時代へ
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。